
Spot farming – an alternative for future plant production
Spot Farming – eine Alternative für die zukünftige Pflanzenproduktion
Journal für Kulturpflanzen, 71 (4). S. 70–89, 2019, ISSN 1867-0911, DOI: 10.5073/JfK.2019.04.02, Verlag Eugen Ulmer KG, Stuttgart
 This is an Open Access article distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/deed.en).
This is an Open Access article distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/deed.en).Sustainable intensification is described as the desirable goal for agricultural production to increase agricultural productivity while using less input and without adverse environmental impacts. Increasing criticism on current agricultural production systems as well as demographic changes related with labour shortages in rural areas pose major challenges to agriculture all over the world. In this context, digitalization and autonomous machinery provide new opportunities to adapt agriculture to future demands. However, it is unknown what changes are necessary for a sustainable intensification of cropping systems and how future agriculture could look like under consideration of new technologies.
Here we developed a concept for future cropping systems with focus on the requirements of crops and landscapes. In this concept, the agricultural area is classified into individual spots according to their site-specific characteristics. The resulting spot farming approach is completely managed by an autonomous robot system on the level of individual plants. High precision sowing, fertilization and pesticide application could reduce agronomic input and could increase yields. In addition, small robots contribute to soil protection. Furthermore, the spot farming approach considers landscape properties and has the potential for a higher biodiversity and more structural elements as well as an increased social acceptance.
The evaluation of the concept according to agronomical, technical and economic aspects showed that the combination of modern technologies and a reorganisation of agricultural landscapes could contribute to the goal of sustainable intensification.
Key words: Digitalization, field robots, agrobiodiversity, sustainable production, cropping system
Das Ziel der nachhaltigen Intensivierung der Landwirtschaft ist die Steigerung der weltweiten Nahrungsmittelproduktion bei gleichzeitiger Reduzierung des Inputs sowie der Vermeidung von negativen Umwelteinflüssen. Wachsende Kritik an den derzeitigen Produktionssystemen sowie der demografische Wandel, der mit einem zunehmenden Arbeitskräftemangel in den ländlichen Räumen einhergeht, stellen weltweit eine zunehmende Herausforderung für die Landwirtschaft dar. Im Rahmen dieses Problemfeldes bieten die Digitalisierung und autonome Maschinensysteme neue Möglichkeiten um die Landwirtschaft an diese Herausforderungen anzupassen. Bisher ist nicht bekannt, welche Veränderungen zur Erreichung einer nachhaltigen Intensivierung im Gesamtsystem Pflanzenproduktion notwendig sind und wie die Landwirtschaft der Zukunft unter Einbeziehung neuer technologischer Möglichkeiten aussehen könnte.
Im Rahmen dieser Arbeit wurde ein Konzept für zukünftige Pflanzenbausysteme unter Berücksichtigung der Kulturpflanzenansprüche und des Landschaftskontextes entwickelt. Hierbei werden die Agrarflächen nach unterschiedlichen teilflächenspezifischen Eigenschaften bewertet und darauf aufbauend in unterschiedlichen Spots reorganisiert. Das daraus abgeleitete Konzept des Spot-Farmings basiert auf einer vollständigen Bewirtschaftung mit autonomen Robotiksystemen auf Einzelpflanzenebene. Durch höhere Präzision bei Aussaat, Düngungs- und Pflanzenschutzmaßnahmen können Ressourcen gespart und Erträge gesteigert werden. Kleine Robotersysteme können zudem einen Beitrag zum Bodenschutz leisten. Das Spot-Farming-Konzept berücksichtigt darüber hinaus die natürlichen Landschaftseigenschaften, um gesellschaftlich erwünschte Nebenaspekte, wie vielfältigere Kulturlandschaften, mehr Biodiversität und Struktur in der Landschaft, zu berücksichtigen.
Die Bewertung des Konzepts nach pflanzenbaulichen, technischen und ökonomischen Aspekten zeigt, dass die Kombination von modernen Technologien und einer Reorganisierung der Kulturlandschaften zum Ziel der nachhaltigen Intensivierung beitragen kann.
Stichwörter: Digitalisierung, Feldroboter, Agrobiodiversität, Nachhaltige Landwirtschaft, Anbausystem
Agriculture is facing enormous challenges due to the global increase of population, structural changes, land degradation and losses, shortage of resources, growing cost pressure and climate change (Edenhofer et al., 2012). Furthermore, agriculture is under progressing social critique and finding socially accepted solutions becomes more and more difficult.
In this area of tension between challenges and criticism the question is how to overcome the current dilemma. One possible answer is sustainable intensification of agricultural production, an idea originally expressed in a study of the British Royal Society (Baulcombe et al., 2009): Production of more food from the same area of land while reducing the environmental impacts.
There are a lot more publications (Foley et al., 2011; Tilman et al., 2011; Garnett T, 2012; Pretty und Bharucha, 2014; Tittonell, 2014) describing, defining and extending sustainable intensification as a target for the future development of agriculture. It is common to all of them that they promote the goal, but only little is known about how to achieve this idea of plant production on a process level. Studies from across the world reported about the research done in the name of raising productivity and efficiency for several major crops (Richards et al., 2014; Kirkegaard et al., 2016; Morrison et al., 2016). Based on examples from different fields of their research, these studies explained how they have contributed to a higher cropping efficiency using new high efficient cultivars and adapted agronomy practices. Of course, the introduction of high efficient cultivars in combination with well-managed agronomy contributes to a more sustainable production, but all of these examples are settled in common plant production systems. Furthermore, their configuration is a result of structural changes in agriculture combined with technical development in terms of “faster, higher, further” in order to be competitive for the future. As a consequence, the design of present plant production systems has been evolved driven by provided techniques under given economical frameworks of the past.
For this reason, there might be a need for a change of the perspective in order to achieve the goal of sustainable intensification. Plant production systems should be designed following the needs of cultivated plants at first. Therefore, it is necessary to focus on crop farming parameters in order to increase crop yield and efficiency of used resources such as fertilizer, plant protection products, energy and water. Moreover, restrictions and challenges arising from environmental goals and social critiques have to be integrated. In a second step, technical solutions and their feasibility for the cultivation of such new systems have to be derived and economically assessed in a third step.
The aim of this paper is to offer a vision how the implementation of sustainable intensification could look like in a systemic approach. It starts with the design of a plant production system called “spot farming” focusing on plant-based, social and ecological needs and demands.
In a second step based on the prospective possibilities of digital farming, big data and autonomous machinery, a technical concept is derived against the background of the requirements of spot farming, which is then evaluated economically at the end.
For the derivation of a cropping system meeting the aforementioned goals of sustainable intensification three levels were taken into account in order to express different requirements and restrictions: at plant level, at field level and at landscape level. In a next step parameters influencing crop yield, resource efficiency and ecosystem services as well as social demands were defined within these different levels. Afterwards, four guidelines for the implementation of sustainable intensification were drafted. On basis of these considerations a theoretical concept for a new cropping system meeting the goals and guidelines under given requirements and restrictions the best was developed. Afterwards, general challenges concerning technique and management were defined being settings for the following development of a technical scenario.
The optimal growth of cultivated crops is in general dependent on a number of growth factors (Mitscherlich, 1922) as well as crop cultivation methods being important at plant level:
– Sufficient light and space (above and below ground) and little competition |
– Sufficient soil quality, texture and fauna |
– Adequate and timely water and nutrition supply |
Furthermore, in order to assure product quality and yield it needs:
– Crop protection |
– Crop rotations |
For sustainable intensification of cultivation, these basic requirements have to be satisfied in best way in order to ensure optimal crop growth and plant health as well as to use growth factors efficiently.
On field level there are further requirements and restrictions that should be taken into account in the sense of more efficiency and an environmentally friendly agricultural production system (Tilman et al., 2002; Wezel et al., 2009; Wezel et al., 2014), but also due to social demands. These are e.g.:
– General reduction in the use of agro-chemicals to the required minimum |
– Avoiding the spread of agro-chemicals during the application to non-target areas |
– Strengthened soil protection by avoiding (multiple) crossings, especially with heavy wheel loads |
– Closer attention to microclimatic conditions (such as wind, rain, humidity, frost, dew, soil moisture, solar radiation) and further time-dependent events occurring in nature (e.g. bee flying) in the management of the production areas |
Furthermore, with regard to more efficiency, environmentally friendly agricultural production and social demands, there are also structural requirements and restrictions arising on landscape level (Tilman et al., 2002; Wezel et al., 2009; Wezel et al., 2014). These include e.g.:
– Development of structures adapted to natural geographic and climatic conditions (e.g., consideration of locally changing soil qualities, intelligent use of high and low productivity surfaces, heights profile, geographic orientation, solarization, microclimate) |
– Creation of structures, which restrain wind and soil erosion as well as shifting of agro-chemicals (orientation of the cultivating lines, reinvestment or recultivation of old ditches or landscape features such as hedges) even under changing climatic conditions (e.g. severe rain events) |
– Creation of refuges and buffer zones, which lead to a biotope network and strengthening of biodiversity and ecosystem services in agricultural landscapes. |
– Creation of diverse landscape structures as basis for local recreation and recreational activities |
All these aforementioned requirements and restrictions can only be satisfied if resources are used more efficiently and if crop production is done with regard to the landscape context. Generally, this can be reached if it is possible to follow these four guidelines:
– Improving the allocation of crops towards their specific locations |
– Realizing a better spatial and seasonal utilization of natural resources |
– Raising the efficient use of agro-chemicals |
– Strengthening functional structures at landscape level |
Based on the assumption that many agricultural production areas are not homogeneous in their properties and by taking some of the aforementioned restrictions and requirements into account, the idea of “spot farming” was established being a basic way of considering small-scale differences. The keynote of this approach is to separate the area of arable land into autonomous spots with large homogeneous properties. These planned spots will then be cultivated with either different cultivation methods or even different crops and crop rotations being well adopted to their specific characteristics. With this approach of site specific crop production the crops are allocated to the environment where the natural frame conditions (e.g. soil quality, water availability, microclimate) fit the best. For the definition of such spots existing data, such as soil and yield maps along with others, can be used principally in terms of map overlaying (Fig. 1) for their derivation.

Fig. 1. The concept for crop cultivation in spot farming taking into account small-scale differences in arable land. A - E, map overlaying for the development of specific spots using the aerial image of the field (A), the soil map (B), the yield potential map (C), the combination of the soil and yield potential map resulting in spots (D) and the final spot map with allocated crops A,B,C (E); adapted from CLAAS KGaA mbH.
The spot farming approach results in non-uniform and smaller fields, which are unsuitable for today’s heavy agricultural machinery. However, this is not the only reason to rethink current agricultural machinery equipment since soil compaction is one of the major problems facing modern agriculture (Hamza und Anderson, 2005). The climate change projections for Europe indicated a higher inter-annual variability of the summer climate, associated with hot periods, drought periods and heavy precipitation events (Seneviratne et al., 2006; Teuling, 2018). Moreover, Olesen et al. (2011) projected an increase in winter precipitation whereas there is a substantial decrease of summer precipitation. As a consequence farmers are going to change practices towards earlier sowing dates for spring crops and consequently of other field operations like seedbed preparation in order to avoid hot summer periods and to exploit as much of the winter precipitation as possible. Furthermore, heavy rainfall events in the summertime affect harvest and subsequent processes. These climatic changes will shift agricultural processes into periods with higher soil water content and therefore with a high susceptibility to soil compaction (Hamza und Anderson, 2005). In order to find the right date for sowing negative effects on soil texture due to heavy wheel loads have to be measured against positive effects of good water availability by early sowings. In order to increase the utilization of winter precipitation, a more efficient crop production is possible, if smaller and lighter machinery is used, having larger time frames and being more flexible to work on the fields without having negative impact on the soil texture. This could also be an important argument for winter crops since available time frames for harvest and all other following operations seem to be influenced by heavy rainfall events.
For a better spatial utilization of solar radiation, the arrangement of crops is of importance. In order to maximize the available light and space on plant level a uniform seed pattern design would give an individual plant the largest possible growing space above and below ground and reduce competition between the crops (Fischer und Miles, 1973). Furthermore, due to the special geometry of a uniform seed pattern there are more options for mechanical weeding because the crop can be passed in three different directions (Fig. 2).

Fig. 2. Comparison of a uniform seed pattern with a row seed pattern. A – D. Growth space in a uniform seed pattern (A) and in a row seed pattern (B), machine directions in a uniform seed pattern (C) and in a row seed pattern (D).
This circumstance offers the opportunity for inter and intra row weeding. Furthermore, this design has further positive effects like thinner stands reducing seed and necessary seed dressing quantities. Moreover, thinner stands can potentially reduce the phytosanitary pressure (Krupinsky et al., 2002) and therefore decrease the amount of plant protection products (e.g. fungicides) being necessary. Results from field trials reveal another strong argument for a uniform seed pattern: comparable and even more yield is possible compared to a cultivation of crops with row seeding (Olsen et al., 2005, 2006; Marín et al., 2014). In order to implement a uniform seed pattern it is necessary to develop sowing technology being very precise concerning seed pattern and sowing depth.
The use of agro-chemicals and their shifting due to drift, run-off or drainage can be reduced if the demand for plant protection and fertilization can be analyzed and predicted site or even plant specifically, and if there is technology being able to spread the agro-chemicals in a fast and precise way on this level. This would raise the efficient use of agro-chemicals enormously compared to today´s level. For plant protection purposes this implies that diseases are detected and treated early, before they spread over a larger area. This requires a sophisticated combination of sensor-based inventory diagnostics and forecasting tools working on small-scale data in order to detect at an early stage whether the established threshold has been exceeded. A reduction to the absolute minimum must be sought and should be the impulse for further technical development of agricultural process engineering needed.
Due to structural changes within the last decades agricultural landscapes in Europe has been transformed to larger field units (Stoate et al., 2001; Tscharntke et al., 2005; White und Roy, 2015). Along with this transition, the landscape lost structural components, such as hedges, ditches and flowering verges, which often served as functional elements, preventing crop land from wind and water erosion, for example. Moreover, these “lost structures” functioned as refuges and buffer zones, also being a basis for biodiversity in an agricultural environment (Letourneau et al., 2011). The strengthening of functional structures at landscape level could be a key factor for cropping to improve efficiency and gain resilience of the production system on the one hand side and to fulfil ecological and social demands on the other hand side. The allocation of such elements, such as hedges, fallow land, ecological greenings etc. within the agricultural environment can be part of the allocation process used for spot farming.
Based on the idea of spot farming and following the statements made, a number of requirements for technical implementation are deviated for the development of a technical scenario. Machinery should be:
– Smaller and lighter compared to today's technology |
– Able to work efficiently, also on small spots |
– Able to realize a precise uniform seed pattern |
– Able to implement a plant specific treatment |
In order to develop a robot concept that follows the demands of spot farming, those demands have to be transformed into specific requirements, representing the basis of the robot conceptualization. Each agricultural procedure induced requirements and influencing factors of different forms and those requirements do not automatically lead to the development on a common path (Table 1).
Table 1. Requirements and parameters formed by the agricultural procedures
Tillage and seeding | Plant care | Harvest | ||||||||||
|
|
|
With those requirements set, relevant machine parameters such as the necessary installed power and resulting weights were estimated (Supplementary Information). Small robots with smaller storage capacities on board will increase the number of roll overs on the field. To evaluate the necessary logistics, we used an agent-based simulation tool (Supplementary Information Section 3 and Section 4). For the conceptualisation three major constraints were set:
(1) The robot drivetrain or locomotion mechanism should be utilized in as many procedures and crops as possible. |
(2) The soil compaction should be reduced to a certain minima. |
(4) The machines should run on electric energy, supplied by batteries on the machines. |
Constraint (1) requires a modular machinery concept. Jensen et al. (2012) described a modular tool carrier for research purposes with track modules and an interchangeable implement, mainly used for crop scouting tasks in small crops. In 2013 the company Kongskilde commercialized the Vibro Crop Robotti, which has the property to attach different implements for seeding and cultivation tasks (Green et al., 2014). Building up on this research, a modular robot system, consisting of locomotion units, of process units and of energy supply units was developed. In order to satisfy constraint (1) and to create a modular robot system for all tasks, several considerations had to be done.
First, the available space between plants for the plant care applications was evaluated for the main European field crops wheat, sugar beet, oilseed rape and maize. While the later three offer wide row spacing even if sown in a triangular seed pattern, the distance between winter wheat rows in equal spacing can be much less, depending on the sowing density. A density of 180 seeds per m2 leads to a row spacing of approximately 7 cm in triangular seed pattern. Bearing in mind that the locomotion mechanism should not damage plants, the available space would be about 7 cm. Following this demand would imply huge constraints for the remaining procedures, mainly concerning possible machine weights. Therefore, the plant care in winter wheat was excluded from the modular robot concept and thus a first deviation of constraint (1) had to be done at this point, requiring a second machinery concept for these tasks. With regard to the mentioned uniform planting pattern, the number of plants per square meter and the growth stages, a maximum width for the locomotion units of about 10 cm was estimated. Secondly, the process units had to be designed in a way that deals with the mentioned constraints. To determine the required work result and intensity for the tillage before seeding winter wheat, the pre-grown crop and its harvest have to be considered. We assumed that corn was grown before and that the harvest did not leave any residue on the field. The required work result was thus described as destruction and rough mixing of the maize roots down to a depth of 18 cm and an intensive shredding and mixing to a depth of 8 cm. Based on these considerations a tillage/seeding robot equipped with cutting discs, a rotating cylinder and spiked roller was conceptualized to perform soil cultivation and seeding at the same time (Fig. 3, Supplementary Information Section 2).
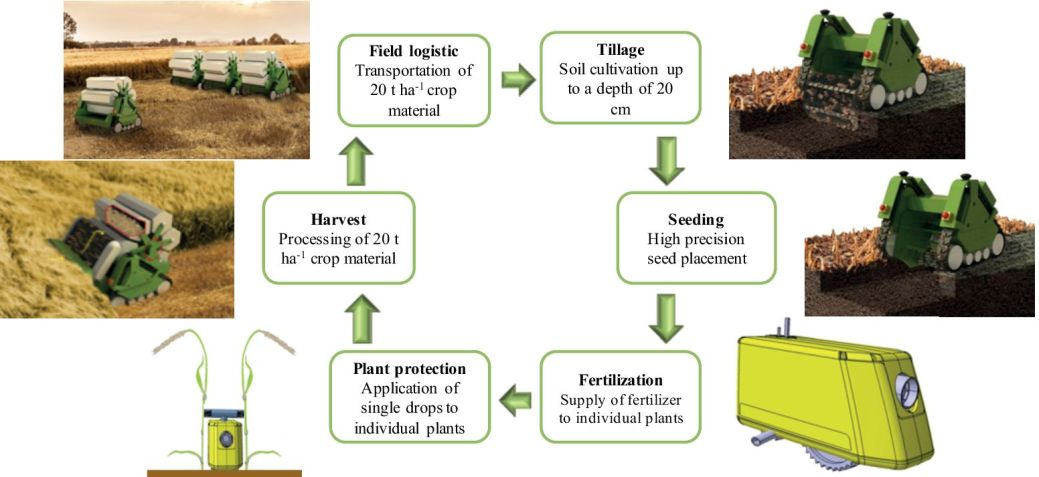
Fig. 3. The conceptualized field robot system for the cultivation of wheat including all cultivation processes from tillage to harvest. TU Braunschweig/Thünen-Institut/Julius Kühn-Institut and Dominik Martin – CC BY (modified from original) & emjay smith –
https://de.fotolia.com/
In a first step cutting discs are being rotated through the soil and cut the roots of the corn plant. Just behind the rotating cutting discs, a rotating cylinder with sharp implements intensively cuts residues and mixes them with the soil. The re-compaction is done by a spiked roller at the back of the robot which is able to stamp the seeds into the soil. The tillage/seeding robot has an estimated weight of 800 kg, a working width of 60 cm and a working speed of 5km h–1. While for the tillage, the power requirement was the main aspect, for harvest both power requirement and the parameters of the harvested goods in terms of volumes and weights have to be considered. Today’s combine harvesters unite all processes such as cutting, collecting, conveying, threshing, cleaning and chopping in one machine. While this leads to a very effective procedure, the weight and power requirement on the field is very high. With regard to constraints (2) and (3) a first approach is to remove the threshing process from the field and to have stationary threshing units at the field edge or even at the farm itself. This could also have economic benefits, since the threshing unit could be operated all day and thus have a lower capacity. Without threshing on the machine, the weights that have to transported over the field and the logistics become more relevant. Different concepts of cutting and transporting ears, stems or the whole plant were evaluated regarding mass and volume of the harvested material (Supplementary Information Section 6).
Based on these considerations, a harvest system was designed, consisting of harvest robots, logistic robots and a stationary threshing station. Figure 3 shows the harvest robot, which is equipped with a small cutter bar and a conveyor to transport the ears into transport boxes. Full boxes are dropped on the field and a new box is inserted by the rotating magazine. The stems are directly chopped at their position, which avoids a subsequent distribution of chopped material. The full boxes, which are distributed over the field, are collected by the logistic robots that constantly travel between the field and the threshing unit. They also supply the harvest robots with charged batteries and could be able to do a first and very shallow tillage.
The required power of the harvest robots was estimated by downscaling the power requirements of conventional combine harvesters and subsequently adapting these estimations by implementing new or adapted processes (Supplementary Information Section 6). The chopping process could be done with a shear-bar cut mechanism instead of an inertia-based cutting principle, reducing the overall power requirement of the harvest unit to approximately 10 kW. The weight of the harvest robot was estimated with the mentioned method to 650 kg. The working speed is about 6 km h–1, which leads to a working capacity of approximately 0.6 ha h–1.
As described above, the modular system is not suitable for plant care tasks in winter wheat. For these tasks, a second robot concept was developed, the “CareRowBot”. The same constraints apply for this concept, which requires a robot for mechanical weeding and the application of fertilizer and plant protection agents. The agronomic requirement for the fertilizer supply is that a high dosage of nutrients is required in a short amount of time in order to grow and establish an efficient and powerful root system in early growth stages. In later growth stages the time interval of the fertilizer application should be extended, for instance in order to react to weather conditions. For the application of plant protection agents, the types of infection and disease propagation at the time of detection have to be considered. Either an infestation of the whole field with a disease, such as Fusarium (Fusarium spp.), requires the treatment of the entire field or a specific treatment of a disease emerging in nests, such as brown rust (Puccinia triticina) is possible. As described above the major constraint for a robot concept for plant care tasks is the available space between plant rows or single plants, in this case approximately 7 cm. As described for the tillage/seeding and the harvest robot the developed “CareRowBot” – concept is based on a modular approach (Fig. 3). The fertilizer application module consists of small augers which convey the powdery fertilizer from the storage inside the robot via tubes to the plants. The dosage of few milligrams is applied to both sides of the robot, so that every second row on the field can be left out. With a working speed of 2.5 km h–1 this leads to a working capacity for the fertilization of 0.028 ha h–1 per robot. The plant protection module uses small brushes on each side of the robot to apply the agent on the plant stem; the substance is distributed through the plant system by the plant itself. By driving through every plant row the substance is applied on the total circumference of the plant, which is necessary for the internal distribution. The working speed is again 2.5 km h–1, but by driving through every row, the working capacity decreases to 0.016 ha h–1 per robot. The size of the internal storage for fertilizer and plant protection agents has to be adapted to the size and the form of the field. The refilling takes place at a field station at the field’s edge (Fig. 4). Weeding is done with a small harrow and small brushes at the outer ends of the harrow. The harrow is effective for most weeds and is a simple and robust tool. In a further development the robot could be equipped with a more intelligent weeding tool. The required power maximum for the drivetrain is 40 W for the weeding operations while driving with a working speed of 2 km h–1. The working capacity is 0.014 ha h–1.

Fig. 4. Field station for the CareRowBot concept. At the field station the robots get refilled with required agents and batteries get exchanged. Photo: TU Braunschweig/Thünen-Institut/Julius Kühn-Institut and anko_ter – https://de.fotolia.com/ (modified from original)
First, the working capacity of the machinery concepts and the field working days per operation defined the constraints to calculate the required number of field robots to farm 150 ha of wheat (Table 2, Supplementary Information Section 7).
Table 2. Required number of field robots, estimation of robot prices and operational costs for the cultivation of a 150 ha wheat-crop with the developed robot system
Assumptions for 150 ha | Tillage/Seeding | Harvest | Logistic | Threshing | Fertilizing | Plant Protection | Weeding | |
|
|
|
|
|
|
| |||
Working width | [m] | 0.6 | 1 | – | 0.14 | 0.07 | 0.07 | |
Working speed | [km/h] | 5 | 5.7 | – | 2.5 | 2.5 | 2 | |
Working capacity | [m2/h] | 3,000 | 5,700 | 32,000 | 280 | 160 | 140 | |
Field working days | [d] | 22 | 22 | 22 | 7 | 1 – 6 | 35 | |
Quantity | [robots/ | 1 | 1 | 1 | 1 | 32 – 56 | 3 – 131 | 64 |
Robot prices [€/robot] | 23,000 | 17,000 | 12,000 | 22,000 | 1,000 | 1,200 | 900 | |
Operating costs [€/ha] | 26 | 48 | 21 – 36 | 2 – 101 | 39 | |||
Today’s operating costs [€/ha] | 27 | 107 | 25 | 7 | 55 | |||
The field working days are assumed working days with acceptable weather and field conditions per year for the operations. The assumption of the total field area accounts for the indivisibility of the robot with the highest field capacity per day. The tillage and seeding robot can seed 150 ha wheat per year.
The assumed field working days are based on the climate region of the Magdeburger Börde, an important agricultural production area in Germany, but we assumed a little more field working days for the tillage and seeding operations because of the lightweight robots compared to today’s heavy machinery. Heavyweight machinery has trouble to handle rainy weather, because of the reduced traffic ability of wet soil. The assumption is that the lighter and smaller field robots have less timeouts through bad weather conditions.
Secondly, there are no market prices for the developed robot concepts, that is why we estimated the future product prices (Table 2, Supplementary Information Section 7).
Thirdly, the operating costs were calculated based on the quantity of robots under consideration of the estimated product prices. The operating costs are the sum of capital (depreciation and interest cost), repair and energy costs (Table 2, Supplementary Information Section 7).
The required number of robots for 150 ha wheat are higher for fertilizing, weeding and plant protection as compared to the other operations, because they are much smaller to be able to drive between the crops. The small robots use the whole production area operating precisely without losing productive field area through conventional wheel tracks. The estimated product prices of these very small robots are as well much lower than the robots for tillage and harvest operations. The prices of all analyzed robots vary from 900 to 23,300 €.
Finally the estimated operational costs differ from 2 to 101 €/ha according to the different operations in wheat production. The operating costs of the presented concepts are close to or even lower than those of today´s large-scale machinery.
Over the past decades, the advances in agriculture have contributed to an outstanding increase in the overall production and at the same time formed the framework for today´s plant production. The resulting technical driven cropping systems are designed for high crop yields and high productivity but they are lacking to achieve today´s social and ecological demands. In order to achieve the goal of sustainable intensification under consideration of the aforementioned demands at the same time it is necessary to focus onto the optimal growth conditions for cultivated plants with regard to the specific field and landscape level. Small and precise robots can help to take care of the requirements arising from such new plant production systems.
Worldwide, great efforts have been made to develop autonomous systems for agricultural procedures to increase efficiency and to answer the increasing labour shortage (Bechar und Vigneault, 2016, 2017).
These approaches focused mainly on certain agricultural procedures for different fruit crops and vegetables. To our knowledge, there are no approaches to automate the whole production of field crops like wheat. The main challenge for agricultural field robots is the work in an unstructured environment and with unstructured objects (Bechar und Vigneault, 2016). In our concept the navigation of the evaluated robots is secured through ultrasonic and GPS sensors for costs and robustness reasons. Equipment’s costs of crop-row vision guidance systems are lower than RTK GPS equipment costs but the robust crop detection and identification remains as a big challenge towards commercial development of robotic technology (Slaughter et al., 2008; Bechar und Vigneault, 2016).
However, this study emphasizes the potential of small field robots to solve today`s limitations of agricultural production systems and to contribute to the goal of sustainable intensification. The presented concept reveals that the cultivation of wheat with an autonomous robot system could lead to a high precision application of pesticides and fertilizers and in consequence could reduce the environmental impact of these operations. At the same time such a system would reduce soil compaction due to lower machine weights (Raghavan et al., 1979; Arvidsson und Håkansson, 2014). Moreover, the cultivation with small autonomous field robots offers the opportunity to redesign arable farming systems and to separate large scaled fields into smaller spots. These spots could be separated and cultivated according to site-specific requirements with adapted crop rotations, while less productive spots could function as refuges or buffer zones by reintroducing landscape elements, such as hedges, pastures, flower meadows or woodlots. Such a diversification across ecological, temporal and spatial scales has the potential to maintain or regenerate ecosystem services, such as resilience, soil quality, nitrogen fixation, pest, weed and disease control and pollination services (Zhang et al., 2007; Kremen und Miles, 2012; Ratnadass et al., 2012) as well as to increase productivity (Malézieux et al., 2009; Tscharntke et al., 2012). On a social level more diversified cropping systems could increase acceptance of agriculture in general public since diversified farming systems produce less environmental and social harms (Kremen und Miles, 2012). However, it is crucial for the implementation of robotic technology in agriculture to meet certain criteria (Bechar und Vigneault, 2016). In this context, first and foremost the need of economic benefit is mentioned. The economical assessment of the conceptualized robot concept in this study has shown the potential to reduce operational costs, especially for harvest and weeding procedures and therefore complies with this requirement. The competitiveness of the robot scenario depends on assumptions about future cost trends, that is why there are uncertainties in the estimated costs. However, on the other side the described concept of plant production includes several positive effects on external costs, which are not taken into account yet. The results show just a rough estimation but the capital costs of the robots could even get lower, if the robots could be used for different operations.
Overall, there are different challenges for sustainable agriculture systems in the future. Besides cost-efficiency there exist important challenges to the broad expansion of autonomous field robots, such as reliability, safeguarding and system complexity before prototypes move into the production stage (Rovira-Más et al., 2015). As a next step, it is necessary to transfer the conceptualized robot system into field conditions to demonstrate functionality and performance. Further research is needed to quantify potential advantages of ecological services, control of pests and diseases and productivity (Malézieux et al., 2009; Kremen und Miles, 2012; Duru et al., 2015).
Arvidsson, J., I. Håkansson, 2014: Response of different crops to soil compaction—Short-term effects in Swedish field experiments. Soil and Tillage Research 138, 56–63, DOI: 10.1016/j.still.2013.12.006.
Baulcombe, D., I. Crute, B. Davies, J. Dunwell, M. Gale, J. Jones, J. Pretty, Sutherland, C.W. Toulmin, 2009: Reaping the benefits: Science and the sustainable intensification of global agriculture. London, The Royal Society, 86.
Bechar, A., C. Vigneault, 2016: Agricultural robots for field operations: Concepts and components. Biosystems Engineering 149, 94–111, DOI: 10.1016/j.biosystemseng.2016.06.014.
Bechar, A., C. Vigneault, 2017: Agricultural robots for field operations. Part 2: Operations and systems. Biosystems Engineering 153, 110–128, DOI: 10.1016/j.biosystemseng.2016.11.004.
CLAAS KGaA mbH: Precision Farming. Zugriff: 27. Juli 2018, URL: http://www.claas.de/produkte/easy/precision-farming/crop-sensor-isaria/map-overlay. assessed on January 31. 2019.
Duru, M., O. Therond, G. Martin, R. Martin-Clouaire, M.-A. Magne, E. Justes, E.-P. Journet, J.-N. Aubertot, S. Savary, J.-E. Bergez, J.P. Sarthou, 2015: How to implement biodiversity-based agriculture to enhance ecosystem services: A review. Agronomy for Sustainable Development 35 (4), 1259–1281, DOI: 10.1007/s13593-015-0306-1.
Edenhofer, O., R. Pichs Madruga, Y. Sokona, 2012: Special report on renewable energy sources and climate change mitigation: Summary for policymakers: a report of working group III of the IPCC and technical summary. New York, The Intergovernmental Panel on climate change.
Fischer, R.A., R.E. Miles, 1973: The role of spatial pattern in the competition between crop plants and weeds. a theoretical analysis. Mathematical Biosciences 18 (3-4), 335–350, DOI: 10.1016/0025-5564(73)90009-6.
Foley, J.A., N. Ramankutty, K.A. Brauman, E.S. Cassidy, J.S. Gerber, M. Johnston, N.D. Mueller, C. O’Connell, D.K. Ray, P.C. West, C. Balzer, E.M. Bennett, S.R. Carpenter, J. Hill, C. Monfreda, S. Polasky, J. Rockström, J. Sheehan, S. Siebert, D. Tilman, D.P.M. Zaks, 2011: Solutions for a cultivated planet. Nature 478 (7369), 337–342, DOI: 10.1038/nature10452.
Garnett T, G.C., 2012: Sustainable intensification in agriculture. Navigating a course through competing food system priorities. Food climate research network and the oxford martin programme on the future of food.
Green, O., T. Schmidt, R.P. Pietrzkowski, K. Jensen, M. Larsen, G. Edwards, R.N. Jørgensen, 2014: Commercial Autonomous Agricultural Platform - Kongskilde Robotti. In: RHEA-2014: New trends in mobile robotics, perception and actuation for agriculture and forestry. Gonzales-de-Santos, P. und A. Ribeiro (Hrsg.), [Madrid, RHEA project.
Hamza, M.A., W.K. Anderson, 2005: Soil compaction in cropping systems. Soil and Tillage Research 82 (2), 121–145, DOI: 10.1016/j.still.2004.08.009.
Jensen, K.H., S.H. Nielsen, R.N. Jørgensen, A. Bøgild, N.J. Jacobsen, O.J. Jørgensen, C.H. Jaeger-Hansen, 2012: A low cost, modular robotics tool carrier for precision agriculture research. Proceedings of the 11th International Conference on Precision Agriculture, Indianapolis, IN, USA.
Kirkegaard, J.A., J.M. Lilley, M.J. Morrison, 2016: Drivers of trends in Australian canola productivity and future prospects. Crop and Pasture Science 67 (4), i, DOI: 10.1071/CPv67n4_FO.
Kremen, C., A. Miles, 2012: Ecosystem Services in Biologically Diversified versus Conventional Farming Systems: Benefits, Externalities, and Trade-Offs. Ecology and Society 17 (4), DOI: 10.5751/ES-05035-170440.
Krupinsky, J.M., K.L. Bailey, M.P. McMullen, B.D. Gossen, T.K. Turkington, 2002: Managing Plant Disease Risk in Diversified Cropping Systems. Agronomy Journal 94 (2), 198, DOI: 10.2134/agronj2002.0198.
Letourneau, D.K., I. Armbrecht, B.S. Rivera, J.M. Lerma, Carmona, Elizabeth Jiménez, M.C. Daza, S. Escobar, V. Galindo, Gutiérrez, López Mejía, Rangel, Aleyda Maritza Acosta, J.H. Rangel, Rivera Leonardo, C.A. Saavedra, A.M. Torres, Trujillo, A.R. Trujillo, 2011: Does plant diversity benefit agroecosystems? A synthetic review. Ecological Applications 21 (1), 9-21.
Malézieux, E., Y. Crozat, C. Dupraz, M. Laurans, D. Makowski, H. Ozier-Lafontaine, B. Rapidel, S. Tourdonnet, M. Valantin-Morison, 2009: Mixing plant species in cropping systems: Concepts, tools and models. A review. Agronomy for Sustainable Development 29 (1), 43–62, DOI: 10.1051/agro:2007057.
Marín, C., J. Weiner, C. Swanton, 2014: Effects of density and sowing pattern on weed suppression and grain yield in three varieties of maize under high weed pressure. Weed Research 54 (5), 467–474, DOI: 10.1111/wre.12101.
Mitscherlich, E.A., 1922: Das Wirkungsgesetz der Wachstumsfaktoren. Zeitschrift für Pflanzenernährung und Düngung, A, Wissenschaftlicher Teil 1 (2), 49–84, DOI: 10.1002/jpln.19220010202.
Morrison, M.J., K.N. Harker, R.E. Blackshaw, C.J. Holzapfel, J.T. O’Donovan, 2016: Canola yield improvement on the Canadian Prairies from 2000 to 2013. Crop and Pasture Science 67 (4), 245, DOI: 10.1071/CP15348.
Olesen, J.E., M. Trnka, K.C. Kersebaum, A.O. Skjelvåg, B. Seguin, P. Peltonen-Sainio, F. Rossi, J. Kozyra, F. Micale, 2011: Impacts and adaptation of European crop production systems to climate change. European Journal of Agronomy 34 (2), 96–112, DOI: 10.1016/j.eja.2010.11.003.
Olsen, J., L. Kristensen, J. Weiner, 2005: Effects of density and spatial pattern of winter wheat on suppression of different weed species. Weed Science 53 (05), 690–694, DOI: 10.1614/WS-04-144R2.1.
Olsen, J., L. Kristensen, J. Weiner, 2006: Influence of sowing density and spatial pattern of spring wheat (Triticum aestivum) on the suppression of different weed species. Weed Biology and Management 6 (3), 165–173, DOI: 10.1111/j.1445-6664.2006.00210.x.
Pretty, J., Z.P. Bharucha, 2014: Sustainable intensification in agricultural systems. Annals of botany 114 (8), 1571–1596, DOI: 10.1093/aob/mcu205.
Raghavan, G.S.V., E. McKyes, F. Taylor, P. Richard, A. Watson, 1979: The Relationship Between Machinery Traffic and Corn Yield Reductions in Successive Years. Transactions of the ASAE 22 (6), 1256–1259, DOI: 10.13031/2013.35194.
Ratnadass, A., P. Fernandes, J. Avelino, R. Habib, 2012: Plant species diversity for sustainable management of crop pests and diseases in agroecosystems: A review. Agronomy for Sustainable Development 32 (1), 273–303, DOI: 10.1007/s13593-011-0022-4.
Richards, R.A., J.R. Hunt, J.A. Kirkegaard, J.B. Passioura, 2014: Yield improvement and adaptation of wheat to water-limited environments in Australia - a case study. Crop and Pasture Science (65 (7)), 676-689.
Rovira-Más, F., I. Chatterjee, V. Sáiz-Rubio, 2015: The role of GNSS in the navigation strategies of cost-effective agricultural robots. Computers and Electronics in Agriculture 112, 172–183, DOI: 10.1016/j.compag.2014.12.017.
Seneviratne, S.I., D. Lüthi, M. Litschi, C. Schär, 2006: Land-atmosphere coupling and climate change in Europe. Nature 443 (7108), 205–209, DOI: 10.1038/nature05095.
Slaughter, D.C., D.K. Giles, D. Downey, 2008: Autonomous robotic weed control systems: A review. Computers and Electronics in Agriculture 61 (1), 63–78, DOI: 10.1016/j.compag.2007.05.008.
Stoate, C., N.D. Boatman, R.J. Borralho, C.R. Carvalho, G.R.D. Snoo, P. Eden, 2001: Ecological impacts of arable intensification in Europe. Journal of Environmental Management 63 (4), 337–365, DOI: 10.1006/jema.2001.0473.
Teuling, A.J., 2018: A hot future for European droughts. Nature Climate Change 8 (5), 364–365, DOI: 10.1038/s41558-018-0154-5.
Tilman, D., C. Balzer, J. Hill, B.L. Befort, 2011: Global food demand and the sustainable intensification of agriculture. Proceedings of the National Academy of Sciences of the United States of America 108 (50), 20260–20264, DOI: 10.1073/pnas.1116437108.
Tilman, D., K.G. Cassman, P.A. Matson, R. Naylor, S. Polasky, 2002: Agricultural sustainability and intensive production practices. Nature 418 (6898), 671–677, DOI: 10.1038/nature01014.
Tittonell, P., 2014: Ecological intensification of agriculture—sustainable by nature. Current Opinion in Environmental Sustainability 8, 53–61, DOI: 10.1016/j.cosust.2014.08.006.
Tscharntke, T., Y. Clough, T.C. Wanger, L. Jackson, I. Motzke, I. Perfecto, J. Vandermeer, A. Whitbread, 2012: Global food security, biodiversity conservation and the future of agricultural intensification. Biological Conservation 151 (1), 53–59, DOI: 10.1016/j.biocon.2012.01.068.
Tscharntke, T., A.M. Klein, A. Kruess, I. Steffan-Dewenter, C. Thies, 2005: Landscape perspectives on agricultural intensification and biodiversity â “ ecosystem service management. Ecology Letters 8 (8), 857–874, DOI: 10.1111/j.1461-0248.2005.00782.x.
Wezel, A., S. Bellon, T. Doré, C. Francis, D. Vallod, C. David, 2009: Agroecology as a science, a movement and a practice. A review. Agronomy for Sustainable Development 29 (4), 503–515, DOI: 10.1051/agro/2009004.
Wezel, A., M. Casagrande, F. Celette, J.-F. Vian, A. Ferrer, J. Peigné, 2014: Agroecological practices for sustainable agriculture. A review. Agronomy for Sustainable Development 34 (1), 1–20, DOI: 10.1007/s13593-013-0180-7.
White, E.V., D.P. Roy, 2015: A contemporary decennial examination of changing agricultural field sizes using Landsat time series data. Geo: geography and environment 2 (1), 33–54, DOI: 10.1002/geo2.4.
Zhang, W., T.H. Ricketts, C. Kremen, K. Carney, S.M. Swinton, 2007: Ecosystem services and dis-services to agriculture. Ecological Economics 64 (2), 253–260, DOI: 10.1016/j.ecolecon.2007.02.024.
Till-Fabian Minßen, Jan Schattenberg, Ludger Frerichs
Energy supply unit. The dimension of the energy supply unit is determined by the size of the individual robot. Weight and power requirement of the energy unit vary among the different robot concepts depending on electrical power consumption, which is primarily dependent on working width and area efficiency. With regard to the high packaging of the robots a central energy supply unit is necessary to deliver energy to the processing units of the robots. Electronic actuators were considered as processing units for the robots for reasons of good adjustability, modularity and a local emission-free work process. The estimated performance data for the different robot concepts is based on a 90% degree of efficiency.
In principle it is possible to install the energy supply unit as a battery, as a combustion engine with a power generator, as a fuel cell or in case of a low energy demand as a solar cell. In the present concept batteries were considered as the most suitable energy supply unit. Basic battery characteristics considered for the conceptualization were gravimetric energy density (Wh kg–1) and the volumetric energy density (Wh l–1). Depending on the requirements regarding area efficiency the energy density is determined by recharging times or exchange times for the energy supply units. Further assumptions regarding type or form of the engines, battery-technology, voltage level, packaging and cooling systems were not considered in the conceptualization of the robot system. For the conceptualization of the energy supply for different robot’s electrical power (kW) or electric energy (kWh) were primary used in calculations while capacity (Ah) and voltage level (V) were used to a less extent. If this approach was unsuitable, samples from agricultural technology (Kegel und Tarasinski, 2016) as well as automotive technology were used to calculate capacities and voltage levels. Furthermore, interviews with experts of the Institute of Energy and Process Systems Engineering of the Technical University in Braunschweig were conducted to assess future developments in battery technology. Although forecasts of developments of this technology are difficult, it was assumed that further research and developments in the field of lithium ion technology will increase capacity, discharging currents, and consequently lithium ion batteries will be the predominant technology for the future (Scrosati und Garche, 2010). Therefore, lithium iron phosphate batteries were considered as energy storage systems for the conceptualized robot system. Specific values for batteries used in this concept were assumed to be 250 Wh l–1 for the volumetric energy density and 150 Wh l–1 for the gravimetric energy density.
Kegel, V., N. Tarasinski, 2016: Battery Electric Tractor – Energy consumption and efficiency. In: 4th International Commercial Vehicle Technology Symposium 2016, S. 121-130.
Scrosati, B., J. Garche, 2010: Lithium batteries: Status, prospects and future. Journal of Power Sources 195 (9), 2419–2430, DOI: 10.1016/j.jpowsour.2009.11.048.
Till-Fabian Minßen, Lisa-Marie Urso, Jan Schattenberg, Dieter von Hörsten, Ludger Frerichs, Jens Karl Wegener
Preliminary considerations. In principle, it was assumed that smaller and lighter machinery causes less soil compaction than current agricultural machinery. As a result it was assumed that in future tillage procedures it is not required to loosen compacted soil zones. Nonetheless, it is not possible to renounce tillage in future cropping systems, since it is an important part of integrated disease management strategies. For this purpose the soil must be cultivated to a specific depth in order to achieve an appropriate burial of crop residues with soil material to promote decomposing processes of plant residues (Bailey und Lazarovits, 2003). Thus, it is ensured that organic materials are decomposed to a sufficient level to avoid the accumulation of inoculum sources for fungal diseases. In consequence, future tillage depths are similar to current practices.
Crop cultivation requirements. The requirements on tillage quality for specific soil layers for wheat following maize are given in Table 3.
Table 3. Tillage requirements for wheat following maize
Soil layer | 0–8 cm | 8–18 cm |
loosening | + | ++ |
mixing | ++ | + |
crumbling | + | + |
shredding | ++ | o |
leveling | o | o |
re-compression | + | ++ |
Scale: ++ (very important), + (important), o (less important) | ||
Soil cultivation to a depth of 18 cm is necessary to shred preceding maize roots for a rough mixing with soil material as well as to destruct maize root channels. This is necessary to avoid root development of the subsequent crop and the transmission of soil-borne pathogens within root channels of the preceding maize crop (Otten und Gilligan, 2006). In the layer up to 8 cm depth intensive mixing and shredding of plant residues is required to establish a fine seedbed for a good root development and to promote water and nutrient uptake (Braunack und Dexter, 1989).
Furthermore, a high precision seed placement is a prerequisite in future cropping systems. The optimal planting pattern would be achieved in a triangular seed pattern resulting in an optimal hexagonal space for each individual plant (Fischer und Miles, 1973). It was assumed to seed 180 seeds m–2 resulting in a distance of 7.9 cm between individual wheat plants and a distance of 6.8 cm between crop rows.
Conceptualization of the tillage and seeding robot. For the conceptualization of the tillage/seeding robot the working principles of current power-driven tillage machines like rotary harrows or rotary cultivators were transferred to the tillage requirements of the described cropping system (wheat following maize). Based on this approach tools were designed which fulfil the above mentioned conditions (Table 3) and which have proven the functionality in current production systems.
As described in section “crop cultivation requirements” a 18 cm deep tillage procedure is necessary to destroy maize root channels and to mix crop residues and soil. These requirements could be met using ground driven discs, by cutting the soil or by combing the soil using a blade. However, combing or cutting the soil was excluded from the approach, since these operations require high machinery weights or rather high tractive forces. In contrast to these operations power-driven discs require low tractive forces and were therefore implemented into the conceptualized tillage/seeding robot. To achieve a high level of soil mixture in the upper layer the conceptualized robot is equipped with rotor rollers running behind the cutting discs. Specific tools (tines) at the rotor rollers crush/shred soil particles and prepare the soil for sowing of the subsequent crop. In addition a compaction roller is integrated into the robot. Into the compaction roller specific seeding units were installed which are able to stamp the seeds into the soil. A similar concept based on a stamp seeding system of maize was developed by the company AGCO GmbH. This system could be integrated into the compaction rollers since both tools are based on the same functional principle by rotating around a y-axis. A uniform seed pattern with exact distances between the seeds could be realized using this approach of a single seed placement system.
Dimensioning of the robot. The size of the robot is primary defined by the machinery weight. Based on treadmills developed by Jensen et al. (2012) the weight of the locomotion units was estimated to 150 kg. Further investigations have shown the opportunity for a reduction of the weight of the locomotion units and for the present concept a weight for each locomotion unit of 100 kg (Bethlehem, 2017) was considered. The locomotion units have a soil contact area of 0.08 m2 (length 0.8 m, width 0.1 m). To use the robot in crops like maize, beets and oilseed rape the width was restricted to 0.1 m, while the length was set to 0.8 m to perform turning manoeuvres without damaging the soil surface. A default value of 50 kPa (0.5 bar) was considered as a permitted soil pressure which corresponds to 50% of the today’s soil pressure that is considered as good practice. With regard to this framework the total robot weight is limited to 815 kg which in turn restricted the weight of the processing unit and the energy supply unit to 615 kg. With a given power requirement of 30 kW per meter working width and a power to weight ratio of 0.1 – 0.2 kW kg–1 for modern electric engines the total weight of the drive engine was calculated to 150–300 kg depending on the type of construction. Considering current tillage technology the weight of mechanical components, like robot frame, transmission elements, cutting discs and rotary roller were estimated to be about 280 kg per meter working width (Amazonen-Werke H. Dreyer GmbH & Co. KG).
Based on the robot Xaver (AGCO GmbH) we estimated the weight of each seeding unit included into the compaction rollers to be about 12.5 kg for each row. With a given row distance of 7 cm the total weight of the seeding and compaction unit corresponds to 140 kg with an additional 12.5 kg for the precision seeding system for each meter working width.
Based on the assumptions made in SI 1, a total weight of 100 kg was estimated for the energy supply unit, resulting in a total stored energy of 15 kWh. This battery would guarantee a sufficient working period of the robot (> 0.5 h) even with restrictions regarding dischargeability. The volume of the battery would be 60 l, which would allow the implementation in smaller robots (working width 0.5 m).
Regarding these weight criteria’s together with the default value for soil pressure the working width of the tillage robot was estimated to be 0.6 m.
Assessment of the power requirement.
The total power requirement of the tillage robot is composed of the electric drive power and the required power to drive the specific tools. The estimation of the electric drive power is based on ASAE standards (ASAE, 2002) and on Schreiber und Kutzbach (2008). The total power requirement is determined by:
– power requirement for cutting discs |
– power requirement to drive the rotor rollers |
– power requirement for the seeding unit |
– power requirement for the locomotion units. |
The calculation of the tractive power requirement is primary based on calculations for a disc harrow. This corresponds to a value of 400 N mww–1 × cmwd–1. With the given tillage depth of 18 cm and the working speed of 5 km h–1 a drive power requirement of approximately 11 kW mww–1 was calculated.
The power requirement for the rotary roller is based on default values for a rotary harrow. Based on a value of 1,750 W mww–1 × cmwd–1 and a cultivation depth of 8 cm the power requirement corresponds to a value of 18 kW mww–1.
The power requirement for the drive units are determined by roll resistance, ascent resistance, air resistance and acceleration resistance. For the present concept only roll resistance was considered for the calculation of the drive power, since air and acceleration resistance were negligible considering the slow operating speed. The ascent resistance is getting neutralized considering the cultivation on a specific field. The roll resistance value (FR) was calculated using following equation:

(1)where FN is the weight of the machinery and p is the rolling resistance coefficient. The rolling resistance coefficient depends on tyre characteristics and soil properties. For a field with dry soil conditions a rolling resistance coefficient of 0.08 was considered (Schreiber und Kutzbach, 2008).
Based on these values as well as the requirement to prevent soil compaction a theoretical maximum robot weight of 815 kg was assumed. To move a robot of this dimension with an operating speed of 5 km h–1 each locomotion unit has a power requirement of 1 kW. Overall, a total energy supply of about 29 kW per meter working width as well as 2 kW for the locomotion and the seeding unit is required regardless of the grade of efficiency of drive components.
Since a tillage robot with a working width of 0.6 m was conceptualized, the total power requirement equals 23 kW considering a grade of efficiency of 90% for all power-driven elements.
Amazonen-Werke H.Dreyer GmbH & Co. KG: KE KX KG TL KW: Rotary harrows and rotary cultivators, URL: http://info.amazone.de/DisplayInfo.aspx?id=32593.
ASAE, 2002: ASAE D497.4 FEB03 Agricultural Machinery Management Data. American Society of Agricultural Engineers.
Bailey, K.L., G. Lazarovits, 2003: Suppressing soil-borne diseases with residue management and organic amendments. Soil and Tillage Research 72 (2), 169–180, DOI: 10.1016/S0167-1987(03)00086-2.
Bethlehem, S., 2017: Development of an electromechanical chassis for a modular robot concept, Technical University Braunschweig.
Braunack, M.V., A.R. Dexter, 1989: Soil aggregation in the seedbed: A review II. Effect of aggregate sizes on plant growth. Soil and Tillage Research 14 (3), 281–298, DOI: 10.1016/0167-1987(89)90014-7.
Fischer, R.A., R.E. Miles, 1973: The role of spatial pattern in the competition between crop plants and weeds. a theoretical analysis. Mathematical Biosciences 18 (3-4), 335–350, DOI: 10.1016/0025-5564(73)90009-6.
Jensen, K.H., S.H. Nielsen, R.N. Jørgensen, A. Bøgild, N.J. Jacobsen, O.J. Jørgensen, C.H. Jaeger-Hansen, 2012: A low cost, modular robotics tool carrier for precision agriculture research. Proceedings of the 11th International Conference on Precision Agriculture, Indianapolis, IN, USA.
Otten, W., C.A. Gilligan, 2006: Soil structure and soil-borne diseases: Using epidemiological concepts to scale from fungal spread to plant epidemics. European Journal of Soil Science 57 (1), 26–37, DOI: 10.1111/j.1365-2389.2006.00766.x.
Schreiber, M., H.D. Kutzbach, 2008: Influence of soil and tire parameters on traction. Research in Agricultural Engineering 54 (No. 2), 43–49, DOI: 10.17221/3105-RAE.
Till-Fabian Minßen, Lisa-Marie Urso, Jan Schattenberg, Dieter von Hörsten, Hannes Hegewald, Ludger Frerichs, Jens Karl Wegener
Preliminary considerations. In agricultural production fertilization comprises the management of residual crop materials, the application of organic fertilizers as well as the application of mineral fertilizers. Organic fertilizers are very heterogeneous in their nutrient content, viscosity and dry matter content and for these uncertainties they were excluded in the present conceptualization of the robot system. Therefore, we only regarded mineral fertilization with a specific focus on nitrogen fertilization.
In Germany wheat is usually fertilized in 2 or 3 split applications in each growing season. Based on these management practices we calculated a maximum application capacity of 130 kg urea fertilizer per ha, which amounts to 60 kg total N ha–1 and is in accordance with the range of recommended N fertilization rates for wheat in Germany. Furthermore, a high precision N application to individual plants is necessary to ensure a high nitrogen use efficiency of each plant and to avoid N losses through leaching or gaseous N emission.
A modular approach. The small robots were conceptualized as a modular system in order to allow the performance of several cultivation procedures like plant protection (see Supplementary Information section 4) or weeding (see Supplementary Information section 5). To meet this demand it is necessary to separate the robots into process units (operating units) and drive units. To meet the high packaging requirements the energy supply units are included into the drive units. An exemplary construction is shown in Fig. 5.
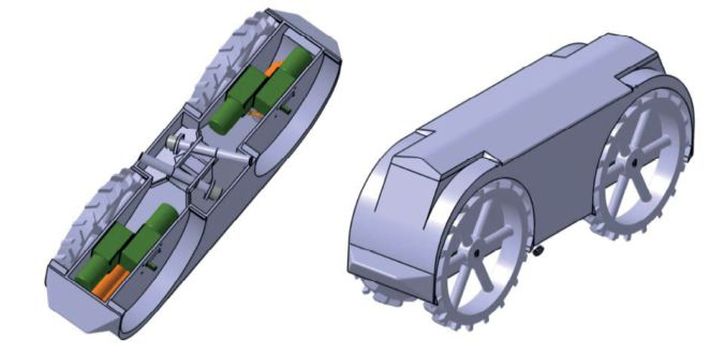
Fig. 5. Construction of a modular based CareRowbot (green: drive units; orange: batteries) The implemented batteries have an energy output of 60 Wh. The basic weight of the modular robot comprising of engine, transmission and frame was estimated to 5 kg.
Conceptualization of the fertilizer robot. To estimate the fertilizer storage capacity it is mandatory to determine the applied amount for each crossing. Furthermore the storage capacity is influenced by the field size. For the concept a field size of 30 ha (390 m wide, 780 m long) was considered which refers to typical field sizes of the Magdeburger Börde, a high yielding cropping area in Germany. Because of the small size of the robots it is impossible to carry large amounts of fertilizer and therefore the robots have to be refilled frequently. For this purpose a refill station has to be installed at the edge of the field. At this station fertilizer robots exchange empty batteries and are getting refilled with fertilizer.
With a crop density of 180 plants m–2 and a fertilization rate of 130 kg urea ha–1 each plant receives 70 mg urea. Considering a field length of 780 m each crop row is compromised of 9,900 individual plants. To fertilize the number of plants of two crop rows within one crossing it is required to carry fertilizer for 19,800 individual plants, which resulted in an overall fertilizer amount of 1.4 kg and a total storage volume of 1.76 dm3 for each crossing considering a density of 0.8 kg m–3 for the urea fertilizer. Therefore the storage capacity was set to 1.5 kg which corresponds to a total volume of 1.8 dm3.
For the application of the fertilizer a dosage system based on augers on each side of the robot was designed, which transported the fertilizer from the storage container to the plants via tubes. The robot is working with a low operating speed of 2.5 km h–1. Due to the high dynamic of the small robot a higher operating speed was precluded to avoid collisions and plant damage.
Power requirement. The power requirement of the fertilization robot is determined by the drive power and the power for the dosage system. With regard to the efficiency of electric engines the required drive power for the chassis was estimated to 18 W. For the fertilization the power demand of the dosage system corresponds to 1 W for each auger, resulting in an overall power requirement of 20 W for the robot.
Area efficiency. Decisive factors for the calculation of the area efficiency were operating speed, field length, drive routes from the field edge to the refill station and refill times. Due to the low storage capacity it is needed to refill the robot after each crossing. A refill time of 14 seconds was presumed. Since the robot is passing through the field along the longitudinal side it was assumed that halfway of each broadside of the field a refill station is located (Fig. 6).
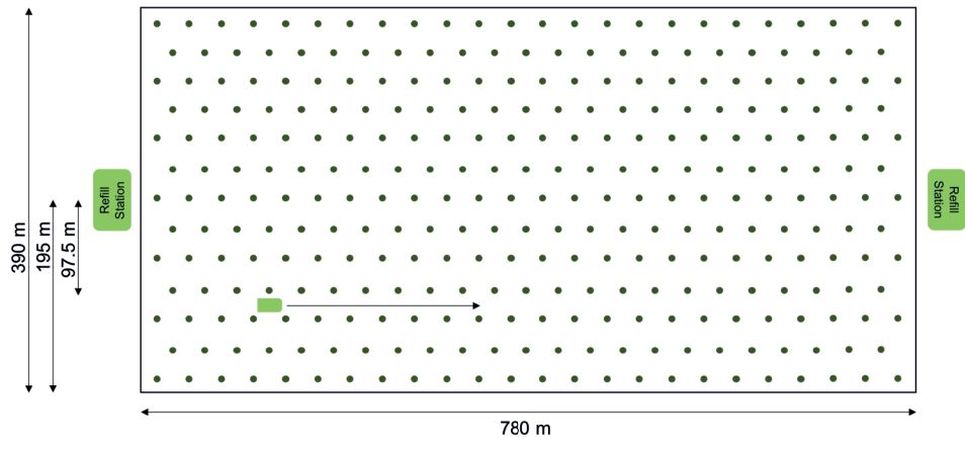
Fig. 6. A schematic representation of the conceptualized field, travel distances and positions of the refill stations
As a consequence a mean distance of 97.5 m has to be completed by the robot to get refilled and after refilling to continue the fertilization process. On the basis of these parameters the area efficiency (AE) in ha h–1 was calculated as following:
(1)where FS is the size of the field, TC is the total crossing time calculated as:

(2)where NC is the total number of crossings, FD is the operation distance for each crossing (m) and υ is the operating speed (m s–1).
TRR is the required time to drive from the field edge to the refill station and to drive from the refill station back to the field edge to continue the fertilization process, calculated as following:

(3)where NR is the required number of refills, DR is the mean distance from the field edge to the refill station (m). TRt is the total time needed to refill the robot with the required fertilizer amount and is calculated using following equation:

(4)where NR is the required number of refills and TR is the time needed to refill the robot. Using these equations the area efficiency of the fertilization robot was calculated to 0.03 ha h–1, resulting in an energy demand of 0.66 kWh ha–1.
Till-Fabian Minßen, Lisa-Marie Urso, Jan Schattenberg, Dieter von Hörsten, Hannes Hegewald, Ludger Frerichs, Jens Karl Wegener
Preliminary considerations. With regard to specific thresholds for pathogens and pests current pesticide applications are based on treatments of the entire field area. This practice is associated with losses of the agent due to drift caused by wind and by missing the target area (plant surface). Furthermore, using this procedure it is impossible to treat plants according to their health status and inevitable uninfected plants were treated in the same way as infected plants. Therefore, the aim of a future plant protection with small field robots is the individual treatment of plants according to their specific demands. With regard to the ecological impact and the economic benefit it is a priority in the conceptualization of the plant protection robot to reduce the applied pesticide amount. It is even more substantial to attain this objective since herbicides have shown phytotoxicity effects on crops (Sikkema et al., 2007; Hamouz et al., 2015; Robinson et al., 2015). Even if herbicide treatments were carried out at recommended dates yield reductions due to herbicide induced injuries were up to 24% (Robinson et al., 2015). To avoid herbicide attributed yield losses future weed regulation for the present concept (see Supplementary Information section 5) is carried out using mechanical weed control methods. Further yield improvements are expectable if the fungicide application timing is improved due to better monitoring and disease detection (Cook et al., 1999). Similarly, improved detection and monitoring of pests could maximize yields due to better timed insecticide applications.
Cropping requirements.
Taking into account the above described preliminary considerations three main requirements were derived for the pesticide application in future cropping systems:
– individual plant treatment |
– high utilization of the systemic effect of pesticides |
– precise application of insecticides within migration paths of pests |
A specific treatment of diseased plants would result in a reduced application rate and rather could increase the yield of healthy plants.
Conceptualization of the plant protection robot. The chassis as well as the storage container are based on the same modular approach as the fertilization robot. In comparison to today’s application amount of 200 l ha–1 it was estimated that individual plant treatment and improved monitoring could reduce the applied amount to 70 l ha–1 (water + agent mixture). The application could take place using small nozzles which spray individual plants or with small brushes which would spread the required amount on the plant stem. The second system would need an integrated pump to moisten the brushes continuously.
Power requirement. The overall power requirement is 20 kW.
Area efficiency. Since it is required to treat the whole stem circumference the robot has to drive through each row. Due to the low application amount of 70 l ha–1 the robot is able to perform two crossings before refilling is required. Thus, only one refill station is necessary for the plant protection treatment. The refill time was calculated to be about 15 seconds. The operation speed is 2.5 km h–1. The calculation of the area efficiency was performed using equation 2–5 in section SI-3. Accordingly the area efficiency corresponds to 0.016 ha h–1 and the power energy demand amounts to 1.2 kWh ha–1.
To evaluate the impact of future monitoring opportunities a second scenario was considered. In this approach it was assumed that an area of 3% (0.9 ha of 30 ha) was infected with brown rust disease (Puccinia triticina). The infected area was located in the central of the field. For this reason the robots have to cover a longer distance to get refilled (Fig. 7).
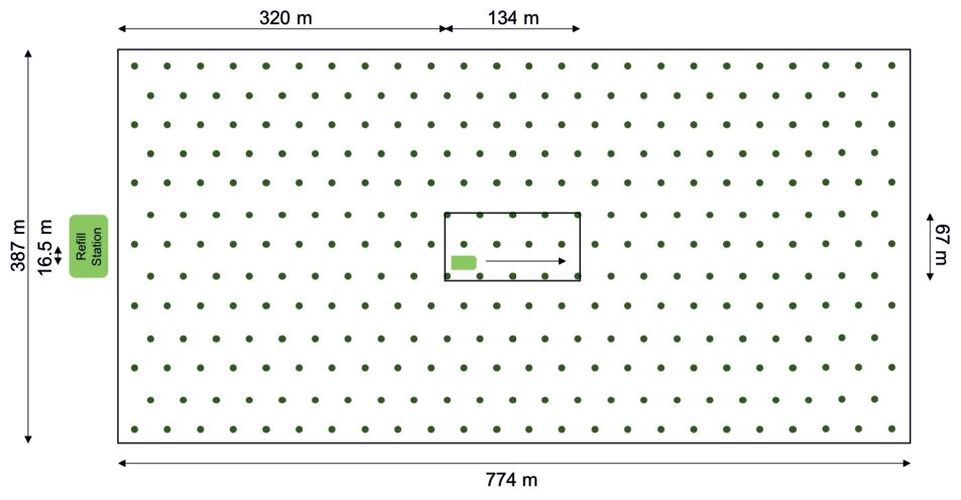
Fig. 7. A schematic representation of the conceptualized field, travel distances and position of the refill station for the 3% plant protection scenario
For this scenario the area efficiency is 0.014 ha h–1 because of the long distance to the refill station. The energy demand for this scenario amounts to 1.4 kWh ha–1.
Cook, Hims, Vaughan, 1999: Effects of fungicide spray timing on winter wheat disease control. Plant Pathology 48 (1), 33–50, DOI: 10.1046/j.1365-3059.1999.00319.x.
Hamouz, P., K. Hamouzová, K. Novotná, 2015: Effects Of Spring Herbicide Treatments On Winter Wheat Growth And Grain Yield. Scientia Agriculturae Bohemica 46 (1), 1–6, DOI: 10.1515/sab-2015-0010.
Robinson, M.A., J. Letarte, M.J. Cowbrough, P.H. Sikkema, F.J. Tardif, 2015: Winter wheat (Triticum aestivum L.) response to herbicides as affected by application timing and temperature. Canadian Journal of Plant Science 95 (2), 325–333, DOI: 10.4141/cjps-2014-109.
Sikkema, P.H., L. Brown, C. Shropshire, N. Soltani, 2007: Responses of three types of winter wheat (Triticum aestivum L.) to spring-applied post-emergence herbicides. Crop Protection 26 (5), 715–720, DOI: 10.1016/j.cropro.2006.06.010.
Till-Fabian Minßen, Lisa-Marie Urso, Jan Schattenberg, Dieter von Hörsten, Ludger Frerichs, Jens Karl Wegener
Preliminary considerations. Globally, 20–40% of potential crop yield is lost due to weeds (Oerke, 2006). In modern farming systems herbicides are used to control weeds and the total input of herbicides in crop production increased worldwide (Gianessi, 2013). However, excessive use of herbicides is associated with development of resistance and environmental problems (Harker et al., 2012). In addition, herbicides caused adversely effects on cultivated plants and in consequence cause yield limitations (Robinson et al., 2015). Taking these aspects into account for the conceptualization, it was assumed that future cropping systems rely on mechanical weed control strategies. The functional principle of mechanical weed control is based on cutting, uprooting or burying of weeds and several tools are available to meet these demands (Chicouene, 2007).
The majority of previously designed weeding robots have been four-wheeled agricultural platforms with two- or four-wheel steering equipped with various tools for precision weed control (Bawden et al., 2017). While these robots move above the crop to detect and control weeds for the present concept it was assumed that the weeding robot is moving between rows. With this approach the period of weed control in wheat would be prolonged since the small robots move between plants and consequently are independent of the crop growth stage.
Conceptualization of the weeding robot. The conceptualized weeding robot is based on the same modular approach as the fertilization and plant protection robot. It is equipped with a harrow as well as flexible brushes on each side. The operating process is based on uprooting of weeds between crop rows and burial of weeds within crop rows. Due to the triangular seed pattern the weed robot is able to work in three different directions and consequently weeds are controlled by alternating harrowing and burying (Fig. 8).
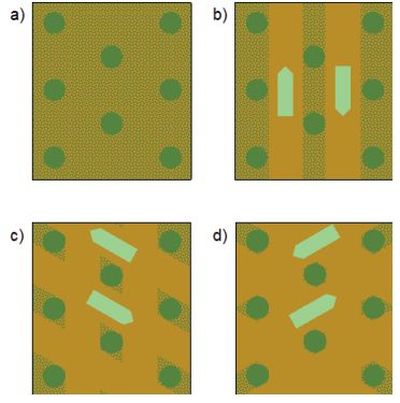
Fig. 8. Working directions of the weeding robot in wheat sown in a triangular seed pattern a – d. schematic representation of a crop without weeding (a), schematic representation of the weed-controlled area with one crossing (b), schematic representation of the weed-controlled area with two crossings (c), schematic representation of the weed-controlled area with three crossings (d). Green dots represent wheat plants, arrows show the weed-control direction.
Power demand. With regard to the specific traction force the weed-control robot requires a powerful drive unit. Using ASAE standard values for a coil tine harrow the traction force demand was estimated to 35 N for a harrow with a working width of 7 cm.
Furthermore, for the estimation of the power requirement working speed is a crucial factor. The recommended speed for a sufficient weed control using a harrow is varying between 5 km h–1 and 10 km h–1. Common weed harrows in organic agriculture treat the entire field area and crops are exposed to the same treatment as weeds (Rasmussen, 2004). Therefore harrowing may control weeds, but also damage crops (Rasmussen et al., 2008). A small robot has the potential to harrow the inter-row area and would left the wheat crops undisturbed. Considering the high dynamic and the manoeuvrability of the weed-control robot it is not recommended to operate with the working speed recommended for today’s harrows. Accordingly, we assumed a working speed of 2 km h–1 for the weed-control robot.
As a result of these constraints the estimated tractive power corresponds to 20 W. The required power to overcome the drive resistance was equal to the fertilization and the plant protection robot and amounts to 18 W. Consequently, the total power required to operate the weeding robot was supposed to be 40 W.
Area efficiency. Time for battery exchange and turning manoeuvres were considered insignificant for the weed-control robot and therefore the area efficiency was calculated as following:

(1)where FS is the field size and TC is the total crossing time calculated using equation 2 in Supplementary Information section 3.
Accordingly, the area efficiency of the weed-control robot corresponds to 0.014 ha h–1.
Bawden, O., J. Kulk, R. Russell, C. McCool, A. English, F. Dayoub, C. Lehnert und T.Perez, 2017: Robot for weed species plant-specific management. Journal of Field Robotics 34 (6), 1179–1199, DOI: 10.1002/rob.21727.
Chicouene, D., 2007: Mechanical destruction of weeds. A review. Agronomy for Sustainable Development 27 (1), 19–27, DOI: 10.1051/agro:2006012.
Gianessi, L.P., 2013: The increasing importance of herbicides in worldwide crop production. Pest management science 69 (10), 1099–1105, DOI: 10.1002/ps.3598.
Harker, K.N., J.T. O'Donovan, R.E. Blackshaw, H.J. Beckie, C. Mallory-Smith und B.D.Maxwell, 2012: Our View. Weed Science 60 (02), 143–144, DOI: 10.1614/WS-D-11-00177.1.
Oerke, E.-C., 2006: Crop losses to pests. The Journal of Agricultural Science 144 (01), 31, DOI: 10.1017/S0021859605005708.
Rasmussen, I.A., 2004: The effect of sowing date, stale seedbed, row width and mechanical weed control on weeds and yields of organic winter wheat. Weed Research 44 (1), 12–20, DOI: 10.1046/j.1365-3180.2003.00367.x.
Rasmussen, J., B.M. Bibby, A.P. Schou, 2008: Investigating the selectivity of weed harrowing with new methods. Weed Research 48 (6), 523–532, DOI: 10.1111/j.1365-3180.2008.00661.x.
Robinson, M.A., J. Letarte, M.J. Cowbrough, P.H. Sikkema, F.J. Tardif, 2015: Winter wheat (Triticum aestivum L.) response to herbicidesas affected by application timing and temperature. Canadian Journal of Plant Science 95 (2), 325–333, DOI: 10.4141/cjps-2014-109.
Till-Fabian Minßen, Lisa-Marie Urso, Jan Schattenberg, Dieter von Hörsten, Ludger Frerichs, Jens Karl Wegener
Preliminary considerations. The general goal of the harvest process is the separation of grains from straw and chaff material. Modern harvesters combine the processes cutting, conveying, threshing, separating and chaffing. As a consequence, these machines are heavy and have a high power demand. For the development of a small harvest robot, a high power demand is critical, since it would require large batteries and heavy electric engines. Furthermore, process units in a combine harvester run sequentially and this could cause machine downtime if a single process unit fails. The largest proportion of the total power requirement is attributable to the threshing unit and to the traction drive (Fig. 9a) (Freye und Heidjann, 1984). Since no data was available in literature on the weight of the process units of a combine harvester it was assumed that the weight composition equals the proportion of the power requirement as presented in Freye und Heidjann (1984) (Fig. 9b). Consequently, the threshing unit and traction drive unit have a large proportion of the total weight.
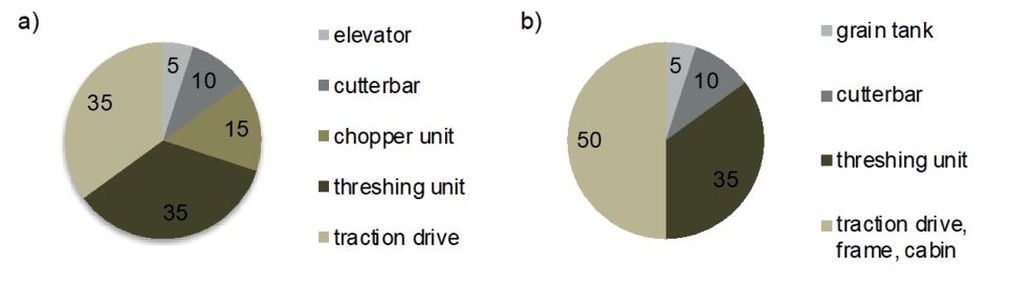
Fig. 9. a) Proportion of the power requirement and b) of the total weight of a combine harvester
The power requirement of the drive traction is primarily determined by the weight and by the rolling resistance. Considering the composition of the total power requirement and the total weight of combine harvesters it was assumed that the separation of the threshing unit would reduce the power requirement and the weight of the combine harvester. Therefore, in the conceptualized robot system the process threshing was considered to take place with an outsourced threshing machine at the field edge or at the farm.
Conceptualization of the harvest robot.
The separation of the harvest processes into two sub-processes requires transport of the harvested plant material from the field to the threshing machine. For the conceptualization of the harvest process four scenarios were investigated for the evaluation of the transported mass and volume as well as the power requirement. The following scenarios were considered:
1. The ears are cutted below the ear approach, stored temporarily on the robot and getting transported to the threshing station. The chopping of the straw takes place at the field. In comparison to a modern combine harvester transported mass is higher due to the straw proportion. Considering a slight compression of the transported goods within the storage unit could compensate for this disadvantage. The cutterbar could be a miniature version of today’s cutting units. |
2. The ears are stripped using a stripper unit (Shelburne Reynolds Engineering Ltd.), stored temporarily and subsequently getting transported to the threshing station. The chopping of the straw takes place at the field. This concept would result in the lowest mass transport but stripping technology is associated with a higher potential of damaged grains. |
3. The stem is cutted in a low-cut scenario above the soil surface leaving only stubble behind. The rest of the wheat plant is temporarily stored on the robot and then transported to the threshing station. This concept has the highest transportation demand, but has the lowest power requirement since the robot would work without a chopping unit. |
4. This concept represents a conventional combine harvester. |
To estimate the logistic costs of each scenario it is necessary to consider the transported mass and volume of wheat plants (Fig. 10) as well as the power requirement for each scenario (Fig. 11).
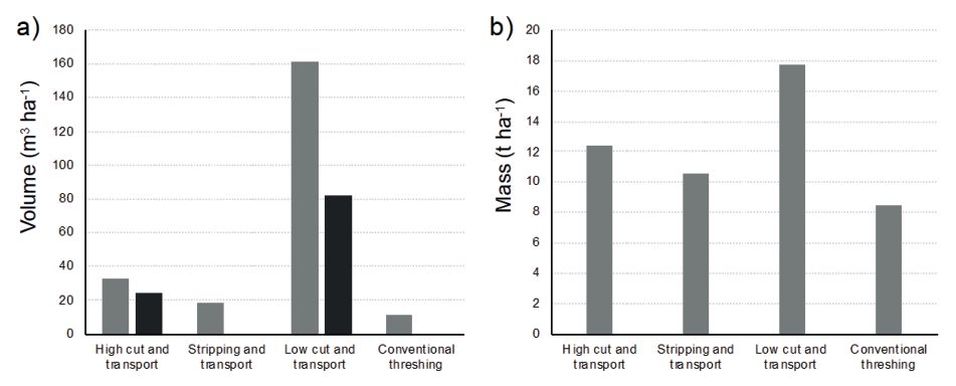
Fig. 10. a) Transported volumes for the specific harvest scenarios (m3 ha–1) (grey bars indicate loose straw, black bars indicate compressed straw); b) transported mass for the specific harvest scenarios (t ha–1)
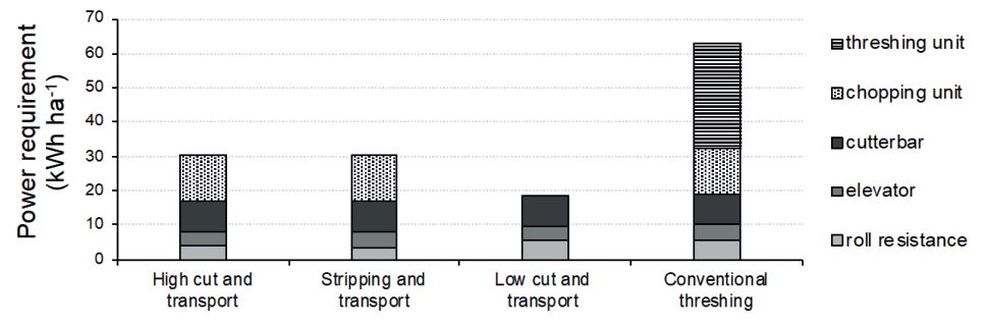
Fig. 11. Power requirement (kWh ha–1) for the specific harvest scenarios
With regard to the transported mass, volume and the specific power demand the conceptualization was perused using a combination of concept 1 and concept 2. Accordingly, a harvest robot equipped with a cutterbar, chopper rolls and storage boxes was conceptualized. The robot is able to cut the ears and to chop the straw using small chopping rolls implemented into the robot. Subsequently, the ears are getting transported into the storage boxes. Each transport box has a storage volume of 120 l and is filled in approximately 50 seconds. When the box is completely filled with ears, it is placed on the field and a new box from the magazine is provided for filling. Logistic robots collect the full boxes and deliver them to the threshing station at the field edge or provide them for further transport to the farm. In comparison to conventional harvest, where only extracted grains are transported to the farm, mass and volume of transported goods is about 46% (mass) and 190% (volume) higher in the presented robot scenario. However, the advantage of this concept is the opportunity to store harvested goods at the farm. The threshing station at the farm could work independent of weather conditions and is therefore able to process the harvested goods 24 hours per day.
Power demand. The power demand for the harvest robot was estimated to 10 kW for cutterbar and chopping rolls by downscaling the power demand of a today’s harvester (Freye und Heidjann, 1984). As the harvest robot is based on the same modular approach as the tillage/seeding robot the power demand for drive traction was estimated to 2 kW resulting in a total power demand of 12 kW. The logistic robots only require power for the drive traction and consequently the power demand corresponds to 2 kW. The power demand of the threshing unit was estimated to 22.5 kW considering the processed grain mass, grain volume and by downscaling the power demand of a threshing unit of a combine harvester (Freye und Heidjann, 1984).
Area efficiency. The working width of the harvest robot was deduced using single component weights of today’s combine harvesters and corresponds to 1 m. The process speed was calculated to 5.7 km h–1 resulting in an area efficiency of 0.57 ha h–1. An “ear-yield” of 11.1 t ha–1 was derived from the illustrated mass and volume of the wheat crop and this corresponds to a mass flow of 1.5 kg s–1 or 2.44 l s–1.
The number of logistic robots depends on field size and field form and was estimated to one logistic robot for each harvest robot. The total power demand for harvesting, transport and threshing was estimated to 102 kWh ha–1.
Freye, T., F. Heidjann, 1984: Improvements in combine harvesting. 10th International Congress of Agricultural Engineering, Budapest, 5, 21–28.
Cord-Christian Gauß, Thomas de Witte, Hiltrud Nieberg, Folkhard Isermeyer
Estimation of the required number of robots. The number of the required robots for each procedure is determined by the robot with the highest area efficiency within the cropping season. With regard to the working capacity and available field working days the tillage/seeding robot is able to cultivate about 150 ha. Therefore, the calculated robot number of each procedure is based on an area of 150 ha using following equation:

(1)where A represents the area in m2, ON represents the number of operations, υ represents the working speed in m h–1, WW represents the working width, FWD represents the available field working days in d a–1 and hD represents the available field working hours per day in h d–1.
The robot number is calculated for each procedure to ensure that required field tasks could be performed independently. A reduction of the total robot number could be possible if the modular system enables the performance of several tasks with the attachment of different process units.
Estimation of the future robot prices.
Since there are no market prices available for the developed robot concepts, we estimated the future product prices for the different robots following step a, b, and c.
a. Calculation of today`s material costs by defining all construction parts per robot: Behind the listed parts are today´s prices for the accumulation of today`s material costs of the robots (Table 4). Table 4. Estimation of individual robot prices based on components, material cost degression and practise orientation
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
b. Consideration of material cost degression due to economy of scales and experience curve effects in the future (Yelle, 1979; Nykvist und Nilsson, 2015; Michaelis et al., 2016):
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
c. Practice-oriented factor multiplication by doubling the final material costs and giving a discount reduction of 40% (personal communication Frerichs 2017). | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Calculation of operational costs. The operating costs were calculated based on the quantity of robots and the estimated product prices and were calculated as following:

(2)where D represents deprivation costs in € a–1, I represents the interest costs in € a–1, E represents the energy costs in € a–1 and R represents the repair costs in € a–1.
For the deprivation costs we assumed a deprivation period of 15 years and a residual value of 0 € and calculated as following:
(3)where I0 represents the investment amount, RV represents the residual value and n represents the deprivation period.
For the interest costs we assumed an interest rate of 2% (i) and calculated as following:
(4)
The energy costs are based on a price of 0.15 € kWh–1 and were calculated as following:

(5)where P represents the power requirement of the robot in kW, t represents the working time in h a–1 and ke represents the costs for each energy unit in € kWh–1. The repair costs for the robots were calculated using following equation:

(6)
Michaelis, S., E. Maiser, A. Kampker, H. Heimes, C. Lienemann, S. Wessel, A. Thielmann, A. Sauer, T. Hettesheimer, 2016: Battery Production Equipment 2030, 20.
Nykvist, B., M. Nilsson, 2015: Rapidly falling costs of battery packs for electric vehicles. Nature Climate Change 5 (4), 329–332, DOI: 10.1038/nclimate2564.
Yelle, L.E., 1979: The learning curve: Historical review and comprehensive survey. Decision Sciences 10 (2), 302–328, DOI: 10.1111/j.1540-5915.1979.tb00026.x.
 Suchen
Suchen




