
Entwicklungsszenarien einer automatisierten Pflanzenproduktion
Scenarios for automated crop production
Journal für Kulturpflanzen, 71 (4). S. 101–107, 2019, ISSN 1867-0911, DOI: 10.5073/JfK.2019.04.05, Verlag Eugen Ulmer KG, Stuttgart
 Dies ist ein Open-Access-Artikel, der unter den Bedingungen der Creative Commons Namensnennung 4.0 International Lizenz (CC BY 4.0) zur Verfügung gestellt wird (https://creativecommons.org/licenses/by/4.0/deed.de).
Dies ist ein Open-Access-Artikel, der unter den Bedingungen der Creative Commons Namensnennung 4.0 International Lizenz (CC BY 4.0) zur Verfügung gestellt wird (https://creativecommons.org/licenses/by/4.0/deed.de).Der aktuelle technologische Fortschritt in der Landtechnik basiert auf dem zunehmenden Einsatz von Automatisierung. Erste Konzepte und Studien zu hochautomatisierten Systemen werden bereits erprobt und es gibt drei mögliche Ausgangssysteme für zukünftige Entwicklungen in der Landtechnik. Auf der einen Seite stehen der Traktor als universelle Großtechnik, aber auch der Selbstfahrer als prozessbezogene Großtechnik. Andererseits bietet der Roboter als Kleintechnik basierend auf neuen Technologien eine weitere Ausgangsbasis für zukünftige Entwicklungen. Für alle Maschinentypen gibt es viele Vor- und Nachteile sowie Initiatoren und Hemmnisse. Entscheidend für die weitere Erhöhung des Automatisierungsgrades ist vor allem die Möglichkeit einer vollständigen Prozessüberwachung und -bewertung. Die Frage, wie zukünftige Pflanzenbausysteme aussehen werden, steht in direktem Zusammenhang mit den technischen Möglichkeiten der Automatisierung und den Anforderungen der Pflanzen. Es werden Entwicklungspfade zur automatisierten Landtechnik betrachtet, die Unterschiede zwischen Kleintechnik und Großtechnik charakterisiert und das Potential für ein Kleintechnikszenario in Verbindung mit neuen Pflanzenbausystemen aufgezeigt.
Stichwörter: Landtechnik, Automatisierung, Entwicklungsszenarien, Pflanzenbausystem
The current technological progress in agricultural engineering is based on the increasing use of automation. First concepts and studies of highly automated systems are already being tested and there are three potential starting platforms for future developments in agricultural engineering. On the one hand, there is the tractor as a universal large-scale technology, but also the self-propelled machine as a process-related large-scale technology. With the development of new technologies, the robot as a small-scale technology also offers a starting platform for future developments. Many advantages and disadvantages can be found for all platforms, as well as initiators and restraints. The crucial factor for further increasing the level of automation is above all the possibility of complete process monitoring and evaluation. The question of what future crop cultivation systems will look like is directly related to the technical possibilities of automation and the requirements of plants. Development paths for automated agricultural engineering will be considered, the differences between small and large-scale technology will be characterised and the potential for a small-scale technology scenario in connection with new crop cultivation systems will be described.
Key words: Agricultural engineering, automation, development scenarios, crop cultivation system
Bei der Betrachtung möglicher Entwicklungsszenarien der landwirtschaftlichen Feldbewirtschaftung spielt die Automatisierung eine entscheidende Rolle. Offen ist jedoch, in welcher Form die Entwicklung zukünftig ablaufen wird. Wird es ein evolutionärer Schritt über einen steigenden Automatisierungsgrad der vorhandenen Großtechnik oder ein revolutionärer, wahrlich disruptiver* Schritt durch den Einsatz von automatisierter Robotertechnik mit neuer Prozesstechnik und neuen Pflanzenbausystemen? Die rasante Entwicklung im Bereich der Sensoren, der Kommunikationstechnik und intelligenter Algorithmen in Verbindung mit enormen Steigerungen der Rechenleistung führt zu vielen neuen Möglichkeiten. Auf der anderen Seite sind viele veränderte und sich verändernde Randbedingungen zu betrachten, wie z.B. der Fachkräftemangel, neue Vorschriften im Bereich des Pflanzenschutzes, die Energieversorgung und auch Aspekte der Nachhaltigkeit. Vor diesem Hintergrund werden mögliche Entwicklungspfade zur automatisierten Landtechnik analysiert und die Wechselwirkung der Kleintechnik zur bestehenden Großtechnik, unter besonderer Berücksichtigung der Veränderung aktueller Pflanzenbausysteme, diskutiert.
Um die Landtechnik in der heutigen Form verstehen zu können, bedarf es der Betrachtung der historischen Entwicklung von Landmaschinen. Die Industrialisierung der Landwirtschaft hat Ende des 19. Jahrhunderts durch eine hohe Mechanisierung angefangen. Durch die Verwendung von Luftreifen in Deutschland ab den 1930er Jahren konnten Traktoren auch für Transportaufgaben eingesetzt werden und die Standardisierung der Zapfwelle und des Dreipunktkrafthebers ermöglichte eine geräteübergreifende Verwendung des Traktors (Franke, 1971). Das war der Beginn des Traktors als Universalmaschine in der Landwirtschaft. 1955 wurde in Deutschland der Rekord mit 140.000 gebauten Traktoren aufgestellt (Renius, 1986). Durch den Traktor konnten bisherige Prozesse verändert werden, neue Geräte wurden dafür entwickelt und angepasst. Veränderungen, wie der aktive Prozessantrieb, stellen eine disruptive Entwicklung dar, welche die damals vorherrschende, auf die Zugkraft von Tieren ausgelegte, Landtechnik ersetzte. Die Erweiterung des Funktionsumfangs des Traktors, wie die hydraulische Prozessversorgung oder die Steigerung der Leistung, ist dabei eine weitere evolutionäre Entwicklung. Der Traktor entwickelte sich stetig weiter und beeinflusste alle wesentlichen Bereiche der Landwirtschaft. Durch die höhere Produktivität konnten landwirtschaftliche Betriebe, trotz Industrialisierung, damit einhergehender Urbanisierung und dem damit verbundenen Arbeitskräftemangel auf dem Land, schneller wachsen. Die Flächenstrukturen vergrößerten sich zur besseren Nutzung stetig wachsender Landmaschinen mit der Konsequenz, dass der Pflanzenbau und auch die Pflanzenzucht auf eine gute Eignung der maschinellen Feldbewirtschaftung ausgerichtet wurden. Selbst alte Saatmethoden, wie die Drillsaat, sind aus der Anforderung einer rationalisierten Saatgutablage entstanden und die Kulturpflanzen wurden vor allem in den letzten Jahrzehnten intensiv züchterisch daran angepasst. Neben den Traktoren als Universalmaschinen haben sich auch in einzelnen Bereichen hochspezialisierte Selbstfahrer durchgesetzt. Vor allem bei zeitkritischen Prozessen, wie der Ernte oder dem Ausbringen und Einarbeiten von Flüssigmist, bieten Selbstfahrer eine hohe Schlagkraft und eine hohe Prozessanpassung. Diese Maschinen haben sich parallel zum Traktor und aus der Traktoranwendung heraus im Markt etabliert. Selbstfahrer bei der Flüssigmistausbringung lösen das Gespann aus Traktor und Tankwagen ab und kombinieren die Ausbringung mit der Einarbeitung in den Boden, benötigen aber einer Zulieferkette, da der Transport ausgegliedert wird.
Bei der Entwicklung wurden neben den Maschinen auch die Prozesse oft skaliert. So ging die Erhöhung der Maschinenleistung mit einer Vergrößerung der Arbeitsbreite einher, während die ursprünglichen Prinzipien, z.B. das Pflügen, dabei nicht wesentlich verändert wurden. Traktoren und Selbstfahrer können ihre Leistung und Produktivität aber nicht unbegrenzt steigern, da z.B. übergroße Arbeitsbreiten das Maschinengewicht i.d.R. überproportional erhöhen. Zur Vermeidung von Bodenverdichtung ist der Bodendruck gering zu halten, für den Straßenverkehr sind wiederum das Gewicht und auch die Abmessungen limitiert. Zur Reduktion des Bodendrucks verwendete Mehrfachbereifung ist im Straßenverkehr aufgrund der begrenzten Fahrzeugbreite i.d.R. nicht zulässig. Raupenlaufwerke als Alternative sind hilfreich, aber auch aufwändig. Beim Controlled Traffic Farming, wie großflächig in Australien eingesetzt, werden Bodenverdichtungen auf festgelegten Fahrspuren bei hohen Arbeitsbreiten in Kauf genommen.
In Abb. 1 ist die beschriebene Entwicklung der Landmaschinen vereinfacht dargestellt. Ausgangspunkt der Entwicklung ist hier das Pferd als Zugtier bei der Mechanisierung der Landwirtschaft. Der Traktor bildet dazu eine disruptive Entwicklung, der evolutionär mit der Zeit weiterentwickelt wurde. Gleiches gilt für die Selbstfahrer. Ergänzt werden die Maschinen durch Roboter als weiterer, neuer disruptiver Pfad zu den bestehenden Maschinen.
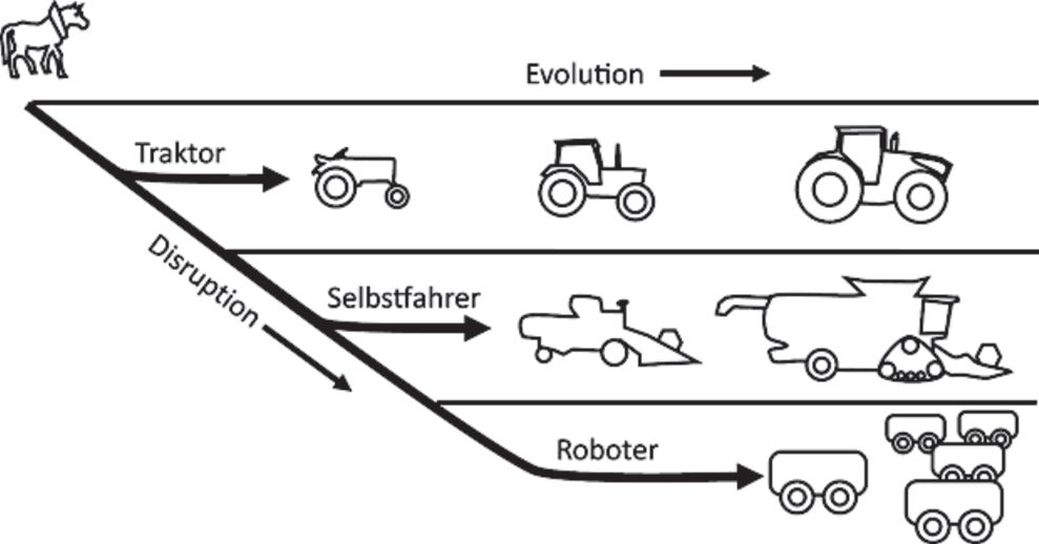
Abb. 1. Entwicklungspfade in der Landtechnik
Roboter und Robotersysteme für die landwirtschaftliche Feldbewirtschaftung werden oft mit kleinen, automatisierten Fahrzeugen, meist im Einsatz als Maschinenschwarm, assoziiert und auch als Kleintechnik bezeichnet. Eine feste Definition dieses Maschinentyps gibt es nicht. In diesem Artikel wird im Folgenden diese Bezeichnung für Maschinen gewählt, die eine bestimmte Stufe der Automatisierung erreichen und sich weder dem allgemeinen Verständnis von Traktoren noch dem von Selbstfahrern zuordnen lassen. Durch Regel- und Assistenzsysteme verfügen heutige Traktoren bereits über einen hohen Automatisierungsgrad vor allem für Fahraufgaben auf dem Feld (z.B. GPS-Lenksysteme) und Selbstfahrer bereits über einen hohen Automatisierungsgrad für Fahr- und auch Prozessaufgaben (z.B. Bestandskantenführung, Einstellung Reinigung, etc.). Der technologische Fortschritt zur Automatisierung von Fahrzeugen lässt sich anhand der Stufen der Automation des SAE Standards J3016 für PKWs beschreiben (SAE International, 2014). Darin ist definiert, unter welchen Bedingungen das Fahrzeug den Fahrer unterstützt oder ersetzt. Stufe 5 beschreibt dabei das vollautomatisierte Fahren unter allen erwarteten und unerwarteten Umständen. In der Landtechnik lassen sich dazu Analogien ableiten, wie durch Streitberger 2018 in Abb. 2 dargestellt. Hier zeigen sich wesentliche Unterschiede gegenüber dem Onroad-Fahrzeug Bereich, da Landmaschinen hauptsächlich eine Prozessaufgabe und meist weniger eine reine Fahraufgabe erfüllen müssen.
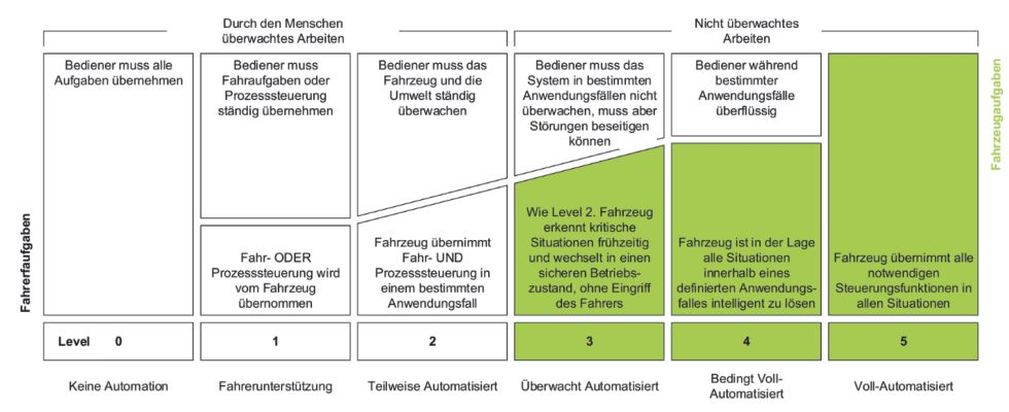
Abb. 2. Stufen der Automation in der Landtechnik (Streitberger et al., 2018)
Derzeit befindet sich die Entwicklung der Landtechnik am Übergang vom durch den Menschen überwachten Arbeiten (Stufe 2) zum maschinell überwachten Arbeiten (Stufe 3). Ab der dritten Stufe der Automatisierung ist eine qualitative Prozessbewertung durch die Maschine selbst notwendig. Roboter oder auch Robotersysteme für die Feldbewirtschaftung, die ohne überwachenden Bediener arbeiten, müssen diese Stufe der Automatisierung erreichen. Traktoren und Selbstfahrer können durch den Bediener auch geringere Stufen der Automatisierung annehmen, auch sind unterschiedliche Automatisierungsstufen für Fahr- und Prozessaufgaben möglich. Das Erreichen der höchsten Automatisierungsstufe ist nicht notwendigerweise das Entwicklungsziel in der Landtechnik, sondern eine angepasste Entwicklung auf die jeweiligen Anforderungen.
Dass sich die Landtechnik weiter entwickeln wird und dies vor allem im Bereich der Automatisierung, ist unstrittig. In welche Richtung dieses gehen wird, ob es nur eine Richtung geben wird oder ob es sowohl eine evolutionäre Weiterentwicklung wie auch disruptive Ansätze geben wird, hängt stark von den Initiatoren und Hemmnissen ab und unterliegt zudem z.B. auch regionalen, ökologischen und ökonomischen Unterschieden. Als Initiatoren für eine mehr und mehr automatisierte Landtechnik sind technologische Fortschritte, vor allem bei der verfügbaren Sensorik zur Umfeld- und Zustandserkennung und der Datenkommunikation und -verarbeitung, zu nennen. Ebenso die Anwendung von intelligenten Algorithmen und künstlicher Intelligenz. Im Speziellen sind z.B. der flächendeckende Ausbau der drahtlosen Kommunikation (4G/LTE) im Besonderen im ländlichen Raum und ganz aktuell in Ergänzung dazu das 5G-Netz mit hohen Bandbreiten und kurzen Latenzzeiten aufzuführen. Aber auch die Fortschritte im Bereich der Elektromobilität ermöglichen entscheidende neue Entwicklungen im Bereich der Landtechnik.
Als nicht technische Initiatoren sind z.B. der verbreitete Fachkräftemangel in der Landwirtschaft und die Reduzierung von Personalkosten anzuführen, ebenso sich verändernde gesetzliche Rahmenbedingungen. Diese können sowohl technologisch fördernd wirken, z.B. durch restriktivere Abgasnormen, die den Einsatz bisheriger Verbrennungskraftmaschinen künftig erschweren, oder auch hemmend durch gesetzliche Lücken bei Regelung von z.B. Haftungsfragen bei Unfällen mit automatisierten und vor allem hoch-automatisierten Maschinen.
Nicht weniger wichtig sind die sich verändernden Rahmenbedingungen durch die bedeutsamen Restriktionen, die den Einsatz von Pflanzenschutz- und Düngemitteln betreffen. Daraus lässt sich im Wesentlichen das Ziel ableiten, mit geringem Einsatz von Ressourcen einen weiterhin hohen Ertrag zu erzielen, also eine nachhaltige Intensivierung in der Landwirtschaft zu erreichen.
Ausgangspunkte weiterer Entwicklungen in der Automatisierung von Landmaschinen bilden jeweils Traktoren, Selbstfahrer und Roboter bzw. Robotersysteme. Diese Maschinen unterscheiden sich in der Art ihrer Automatisierungsmöglichkeiten. Mancher Selbstfahrer weist bereits eine hohe Prozessautomatisierung auf, Sensoren machen die Arbeitsqualität für die Maschine messbar und damit regelbar, während Traktoren weiterhin als Universalmaschine verschiedenste Anwendungen in Kombination mit Anbaugeräten erfüllen. Die Interpretation der Arbeitsqualität erfolgt auf dem Arbeitsgerät, welches den Traktor steuern kann. Bei Robotersystemen, im Sinne der Kleintechnik, spielt die Automatisierung durch die Kommunikation mit anderen Fahrzeugen eine wesentliche Rolle. So können Prozesse, die nicht für die Kleintechnik skalierbar sind, adaptiert werden. Aufgaben, die durch einzelne Maschinen erledigt wurden, können auf eine Vielzahl von Maschinen aufgeteilt werden. Bei den verschiedenen Maschinenkategorien gibt es Spezialisierungen auf bestimmte Bereiche. Durch Spezialisierung, Skalierung und Adaption von Maschinen und Prozessen lassen sich die Maschinenkategorien fließend ineinander überführen. Als Beispiel sei hier der Übergang zwischen dem Selbstfahrer und dem Robotersystem am Beispiel des Mähdreschers genannt. Durch eine Skalierung der Maschinengröße (Verkleinerung) wird eine Adaption des Prozesses notwendig, die beispielsweise durch eine Aufteilung der verschiedenen Prozessschritte des Mähdruschs auf mehrere Roboter erfolgen kann und somit für jeden Roboter wiederum eine Spezialisierung darstellt. Anschaulich macht dies der Blick auf die Entwicklungshistorie des Mähdreschers, bei der nach und nach die einzelnen Prozessschritte zusammengeführt wurden.
Abbildung 3 stellt die Übergänge zwischen den Maschinenkategorien am Beispiel der Maschinen für den Pflanzenschutz bildlich dar. Der Traktor mit angebauter Pflanzenschutzspritze ist ein modulares System. Die Prozessteuerung geschieht durch das Anbaugerät, Fahrgeschwindigkeit etc. werden durch den Traktor oder das Anbaugerät vorgegeben. Eine Spezialisierung der selbstfahrenden Feldspritze ist vor allem das Fahrwerk. Dieses ist durch die Lenkung, die große Bodenfreiheit und die Variation der Spurbreite auf die jeweiligen Pflanzenhöhen und Reihenabstände angepasst.
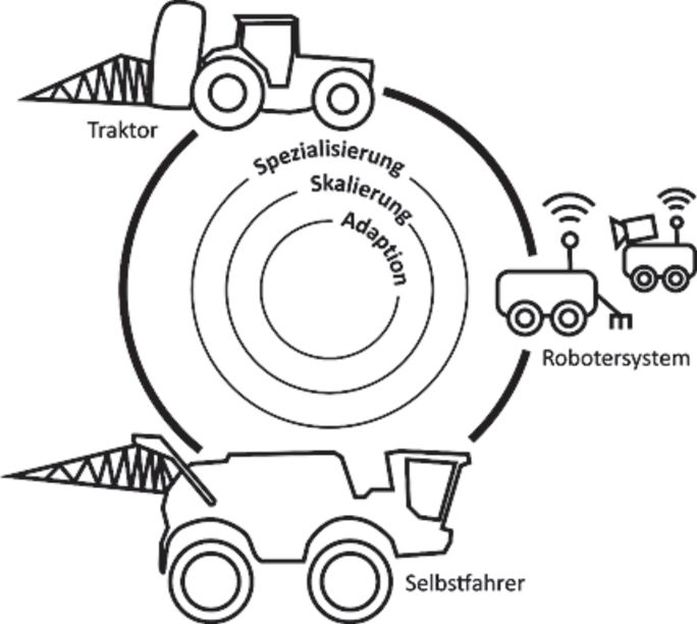
Abb. 3. Ausgangsmaschinen automatisierter Landtechnik
Ein Robotersystem ist dem Traktor gegenüber, wie die selbstfahrende Feldspritze, spezialisiert, gleichzeitig aber auch gegenüber beiden Maschinentypen in der Größe und Leistungsfähigkeit des einzelnen Roboters skaliert. Als Robotersystem kann die Adaption zum Beispiel darin bestehen den Pflanzenschutz nicht klassisch über ein Sprühsystem durchzuführen, sondern z.B. durch ein verteiltes Robotersystem bestehend aus Robotern, die den Bestand bonitieren, und Robotern, die basierend auf diesen Informationen gezielt jede einzelne Pflanze individuell behandeln (Wegener et al., 2019).
Die landwirtschaftliche Feldbewirtschaftung in den entwickelten Ländern wird mit Großtechnik durchgeführt. Durch die Anpassung der Feldstrukturen, Kulturpflanzen und Verfahrensketten wird eine sehr hohe Produktivität erreicht, die besonders in engen Zeitfenstern, wie bei der Ernte oder Pflanzenschutzmaßnahmen, sehr entscheidend ist. Bei der evolutionären Weiterentwicklung der Landtechnik erreichen die heutigen Maschinentypen einen immer höheren Grad an Automatisierung bis hin zur Grenze der Hochautomatisierung, wodurch der Bediener immer mehr von den Fahrzeug- und Prozessführungsaufgaben entlastet wird. Ein sehr wichtiger Bestandteil der Automatisierung ist die Bewertung des Arbeitsergebnisses durch die Maschine. Mähdrescher verfügen z.B. über Sensoren zur Erfassung von Druschverlusten oder zur Bestimmung des Bruchkornanteils. Selbstfahrer spielen vor allem bei der Ernte eine Schlüsselrolle und sind aufgrund komplexer Einstellmöglichkeiten der Prozesse vom Bediener kaum dauerhaft im optimalen Bereich zu betreiben. Traktoren fehlt durch die Vielseitigkeit die Möglichkeit der maschinellen Prozessbewertung. Anbaugeräte können diese spezifischen Funktionen dem Traktor verfügbar machen. Über den ISOBUS-Standard kann das Tractor-Implement-Management-System (TIM) geräteseitig auf Funktionen des Traktors zugreifen. Ballenpressen können so die Fahrgeschwindigkeit für einen optimalen Gutfluss anpassen, aber es gibt nicht für alle Prozesse Möglichkeiten der maschinellen Bewertung des Arbeitsergebnisses. Aktuell gibt es erste Versuche zur Prozessbewertung aktiver Bodenbearbeitungsgeräte, die das vom Bediener festgelegte Arbeitsergebnis einer Kreiselegge kameragestützt unter verschiedenen Bedingungen konstant halten können (Riegler-Nurscher et al., 2017), oder die eine allgemeine Bewertung der Arbeitsqualität bei der Bodenbearbeitung (Riegler et al., 2014; Steinhaus et al., 2018) ermöglichen. Die evolutionäre Entwicklung zu größeren, leistungsfähigeren Maschinen ist aus Gründen der Bodenschonung oder durch gesetzliche Regelungen begrenzt und daher der limitierende Faktor in dieser Entwicklung. Die Pflanzenbausysteme bleiben in diesem Szenario mehr oder weniger unverändert.
Die weitere Entwicklung der automatisierten Landtechnik durch Roboter stellt einen disruptiven Verlauf zum gegenwärtigen System in der mechanisierten Landwirtschaft dar. Der Vergleich zur Ablösung des Zugtieres durch den vielseitigen Traktor ist erlaubt. Bisherige Prozesse und Verfahrensketten werden nicht nur skaliert und spezialisiert, sondern vor allem adaptiert. Zwei mögliche Entwicklungslinien werden gesehen, der Einsatz von Robotersystemen (Kleintechnik) und die vollständige Automatisierung heutiger Maschinen (Großtechnik). Der Einsatz ohne eine Bedienerüberwachung auf der Maschine erfordert gemäß Abb. 2 mindestens die Automatisierungsstufe 3, also als wesentlichen Unterschied zur aktuellen Großtechnik die Notwendigkeit der vollständigen maschinellen Prozessüberwachung und -bewertung.
Viele Prozesse wurden im Laufe der Zeit der gesteigerten Zugkraft der Traktoren angepasst, durch die Kombination von Arbeitsprozessen oder durch die modulare Vergrößerung, wie der Addition von Pflugkörpern bei der wendenden Bodenbearbeitung. Ursache und Wirkung können hier aber auch vice versa argumentiert werden. Die Skalierung zur geringeren Leistung der Kleintechnik, vor allem in Bezug auf die Zugkraft, ist nicht immer möglich. So kann z.B. ein Pflugkörper nicht einfach in seiner Dimension bei gleichbleibender Bearbeitungsqualität reduziert werden. Bei der Bodenbearbeitung sind aktive Antriebe für die Kleintechnik von Bedeutung und solche, die einen geringen Energieaufwand erfordern (Wiecha et al., 2019). Selbstfahrer kombinieren, besonders bei Erntemaschinen, viele Prozesse in einer Maschine. Durch den Einsatz mehrerer Maschinen lassen sich Abläufe auch auf verschiedene Roboter aufteilen. Konzepte, wie schon am Beispiel Mähdrescher angeführt, für alternative Erntesysteme sind in (Herlitzius et al., 2013; Gaus et al., 2017) beschrieben. Für den Logistikprozess, wie bei der Maisernte oder dem Ausbringen von organischem Dünger, sind hohe Massenströme zu bewältigen, um die meist kurzen Zeitfenster auszunutzen. Diese sind in ihrer heutigen Form somit weniger für die Kleintechnik und geringe Maschinengrößen geeignet. Eine höhere Schlagkraft durch kleinere Roboter im Vergleich zur bestehenden Großtechnik, mit den heutigen an große Maschinen angepassten Pflanzenbausystemen und arrondierten Flächen, ist nicht das primäre Ziel der Feldbewirtschaftung der mechanisierten Landwirtschaft.
Roboter werden bereits zur Bonitur, also der Phänotypisierung von Pflanzen, teils direkt verbunden mit der Applikation von Pflanzenschutzmitteln und zur mechanischen Unkrautbekämpfung, eingesetzt, sowie in ersten Feldstudien z.B. für die Aussaat (Ruckelshausen, 2010; Schwich et al., 2019). Aktuell wird der Vorteil von Robotersystemen vor allem in der erreichbaren hohen Präzision, der guten Automatisierungsmöglichkeit und dem schonenden Umgang mit Ressourcen gesehen, also vor allem in den Prozessen Aussaat, Pflanzenschutz und Beikrautregulierung sowie der gezielten Düngung.
In Verbindung mit einer Anpassung der Pflanzenbausysteme, z.B. einer selektiven Ernte bei Getreide, wird auch die Realisierbarkeit weiterer Prozesse durch Robotersysteme vorstellbar.
Die Automatisierung in der Landwirtschaft befindet sich an der Grenze zum maschinell überwachten Fahren und Arbeiten. Dazu ist die Bewertung der verrichteten Arbeit für die weitere Entwicklung entscheidend. Das Arbeitsergebnis muss durch die Maschine messbar und interpretierbar und damit regelbar sein. Basis für höher automatisierte Maschinen bilden neben der etablierten Großtechnik, bestehend aus Traktor und Selbstfahrer, auch Robotersysteme. Diese ermöglichen einen neuen Ansatz für die Landwirtschaft hin zu einer effizienten Produktion mit alternativen Pflanzenbausystemen. Bisherige Verfahren beruhen auf historisch gewachsenen und in ihren Prinzipien oftmals skalierten Prozessen, an die Pflanzen und Umwelt angepasst wurden. Mit den neuen Möglichkeiten in der Landtechnik können aber auch Entwicklungen angestrebt werden, bei denen im Gegensatz zu heutigen Pflanzenbausystemen die Bedürfnisse der einzelnen Pflanze im Mittelpunkt stehen. Auch können innerhalb eines Feldes die Aussaat von Sorten und Arten standortspezifisch angepasst werden (Stichwort: Spot Farming) (Wegener et al., 2017). Die Saatgutablage im Dreiecksverband kann die Nährstoffzufuhr und den Raumbedarf für die einzelne Kulturpflanze verbessern und alternative Pflanzenschutzmaßnahmen entlang und zwischen den Reihen ermöglichen.
Im Vergleich zwischen den beiden Szenarien „Kleintechnik“ und „Großtechnik“ lässt sich festhalten, dass ein wesentlicher Vorteil der Roboter darin liegen kann, die Effizienz durch die Reduzierung der eingesetzten Ressourcen zu erhöhen. Dies bedarf allerdings einer Anpassung heutiger Pflanzenbausysteme, wofür wiederum die speziellen Möglichkeiten der Kleintechnik bzw. Robotik erforderlich sind.
Franke, R., 1971: Rückblick auf 200 Jahre Schlepperentwicklung. Landtechnik 26 (23/24), 599-605.
Fraunhofer-Institut für Produktionstechnologie IPT, 2019: Disruptive Technologien. Zugriff: 6. Februar 2019, URL: https://www.ipt.fraunhofer.de/de/kompetenzen/Technologiemanagement/disruptive-technologien.html.
Gaus, C.-C., T.-F. Minßen, L.-M. Urso, T. de Witte, J.K. Wegener, 2017: Mit autonomen Landmaschinen zu neuen Pflanzenbausystemen: Schlussbericht.
Herlitzius, T., A. Grosa, M. Henke, J. Krzywinski, F. Pahner, M. Klinger, 2013: Concept Study of a Modular and Scalable Self - Propelled Implement System, Max-Eyth-Gesellschaft für Agrartechnik, Conference Agricultural Engineering, Tagung Land-Technik AgEng und AgEng, VDI-Berichte, 2193.
Renius, K.T., 1986: Zur Entwicklung des Traktors nach 1945. Landtechnik 41 (10), 420-425.
Riegler, T., C. Rechberger, F. Handler, H. Prankl, 2014: Image Processing System for Evaluation of Tillage Quality. Landtechnik 69 (3), 125-131.
Riegler-Nurscher, P., J. Karner, J. Huber, G. Moitzi, H. Wagentristl, M. Hofinger, D.H. Prankl, 2017: A system for online control of a rotary harrow using soil roughness detection based on stereo vision, Conference Agricultural Engineering, Max-Eyth-Gesellschaft für Agrartechnik und Landtechnik AgEng, VDI-Berichte, 2300, 559-566.
Ruckelshausen, A., 2010: Autonome Feldroboter, Kuratorium für Technik und Bauwesen in der Landwirtschaft, Internationale Arbeitstagung Angewandte Ethologie bei Nutztieren und KTBL-Vortragsstagung Automatisierung und Roboter in der Landwirtschaft, KTBL-Schrift, 480, 1-10.
SAE International, 2014: Surface Vehicle Information Report: Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems, URL: https://saemobilus.sae.org/content/j3016_201401.
Schwich, S., I. Stasewitsch, M. Fricke, J. Schattenberg, 2019: Übersicht zur Feld-Robotik in der Landtechnik. In: Jahrbuch Agrartechnik 2018. Frerichs, L. (Hrsg.).
Steinhaus, S., L. Trösken, L. Frerichs, 2018: Methodik zur Erfassung und Bewertung von qualitätsbestimmenden Parametern bei der Stoppelbearbeitung, Conference Agricultural Engineering und Max-Eyth-Gesellschaft für Agrartechnik, VDI-Berichte, 2332, 293-300.
Streitberger, N., F. Balbach, E. Nacke, 2018: Vom manuellen Fahren zur vollen Autonomie: Ein Ansatz zur systematischen Definition verschiedener Stufen der Automation in der Landtechnik, Conference Agricultural Engineering und Max-Eyth-Gesellschaft für Agrartechnik, VDI-Berichte, 2332, 213-221.
Wegener, J.K., L.-M. Urso, D.v. Hörsten, T.-F. Minßen, C.-C. Gaus, 2017: Neue Pflanzenbausysteme entwickeln – welche innovativen Techniken werden benötigt? LANDTECHNIK – Agricultural Engineering 72 (2), DOI: 10.15150/LT.2017.3156.
Wegener, J.K., L.-M. Urso, D.v. Hörsten, H. Hegewald, T.-F. Minßen, J. Schattenberg, C.-C. Gaus, T.d. Witte, H. Nieberg, F. Isermeyer, L. Frerichs, G.F. Backhaus, 2019: Spot farming – an alternative for future plant production, SI Section 4. Journal für Kulturpflanzen 71 (4), 70-89, DOI: 10.5073/JfK.2019.04.02.
Wiecha, J., T. Bögel, T. Herlitzius, H. Bernhardt, 2019: Energieeffizienter Einsatz von landwirtschaftlichen Arbeitsmaschinen durch elektrischtraktionsunterstützende Anbaugeräte, 25–35, DOI: 10.5445/KSP/1000088252.
Fußnoten:
„Disruptive Technologien sind Innovationen, die die Erfolgsserie einer bereits bestehenden Technologie, eines bestehenden Produkts oder einer bestehenden Dienstleistung ersetzen oder diese vollständig vom Markt verdrängen“ Fraunhofer-Institut für Produktionstechnologie IPT (2019). |
 Suchen
Suchen