
Journal für Kulturpflanzen, 75 (05-06). S. 151–157, 2023 | DOI: 10.5073/JfK.2023.05-06.04 | Herbst et al.
Spray drift from application of plant protection products with drones in vineyards
Abdrift bei der Anwendung von Pflanzenschutzmitteln mit Drohnen im Weinbau
 | (c) The author(s) 2023 This is an Open Access article distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/deed.en). |
Submitted/accepted for publication: 15 February 2023/2 May 2023 |
Field experiments according to ISO 22866 were conducted to determine the spray drift from Unmanned Aerial Spraying Systems (UASS) applying plant protection products (PPP) in vineyards in order to collect data that can be used for drift risk assessment by authorities.
Different octocopters, nozzles (standard and air induction), application parameters (height, speed) and flight patterns (longitudinal and lateral flight lines) were used. The drift sediment at distances up to 20 m was compared to the German basic drift values for crewed helicopters and ground based air blast sprayers.
In comparison to PPP applications with crewed helicopters, the spray drift risk is substantially lower when using UASSs. For air induction nozzles, the 90th percentile values of drift sediment are even lower than the basic drift values for ground equipment.
This is why, similar to crewed helicopters, UASSs should be equipped with drift reducing atomisers, such as air induction nozzles. Providing this, the existing basic drift values for vineyards would apply also for drift risk assessment for UASS applications.
Unmanned Aerial Spraying System, drone, spray drift, vineyard, basic drift values
Es wurden Feldversuche nach ISO 22866 zur Bestimmung der Abdrift bei der Anwendung von Pflanzenschutzmitteln mit Drohnen im Weinbau durchgeführt, um Messwerte zu gewinnen, die von Behörden für die Risikobewertung verwendet werden können.
Verschiedene Oktokopter, die mit unterschiedlichen Düsen (Standard- und Injektordüsen) ausgestattet waren, wurden mit unterschiedlichen Applikationsparametern (Fluggeschwindigkeit, -höhe und –richtung) eingesetzt. Das Abdriftsediment wurde für Entfernungen bis 20 m bestimmt und mit den Abdrifteckwerten für den Weinbau für Bodengeräte und Hubschrauber verglichen.
Im Vergleich zu den Werten für Hubschrauber ist die Abdrift für Drohnen im Weinbau wesentlich geringer. Werden Injektordüsen eingesetzt, sind die 90sten Perzentile des Abdriftsediments für Drohnen sogar geringer als die Abdrifteckwerte für Bodengeräte.
Deshalb wird vorgeschlagen, Spritzeinrichtungen für Drohnen ausschließlich mit Abdrift mindernden Zerstäubern, wie Injektordüsen, auszurüsten. Unter dieser Voraussetzung können die etablierten Abdrifteckwerte für Bodengeräte im Weinbau auch für die Risikobewertung bei der Anwendung mit Drohnen verwendet werden.
UAV, Drohne, Abdrift, Weinbau, Abdrifteckwerte
When applying plant protection products (PPP), spray drift is one of the major hazards for non-target organisms downwind from the treated areas. German authorities responsible for the authorisation of PPPs have been using empirical models for drift risk assessment for decades, the so-called basic drift values. These curves are the result of a number of field tests with conventional application techniques and represent the 90th percentile of drift sediment values at different distances from the treated field. They are available for different applications and types of crops, such as arable crops, orchards or vineyards (BVL, 2020).
In Germany, a considerable amount of grapes is produced in vineyards on steep slopes with an inclination of at least 30%. Strub & Loose (2016) estimated that this applies to an area of 14,000 ha which corresponds to approximately 14% of the total German vine growing area.
According to European (EU, 2009) and German (DE, 2012) legislation, aerial application of plant protection products is prohibited. Steep slope vineyards are eligible for derogations from this, if aerial application would cause less environmental impact compared to other application techniques and the PPP is approved for this application. This also applies to drones equipped with Unmanned Aerial Spraying Systems (UASS) that have been increasingly used worldwide for the application of PPPs. As drones shall be used in German steep slope vineyards also as a replacement for crewed helicopter applications, the authorisation of PPPs for these applications is necessary. Drone applications are expected to reduce the environmental impact compared to applications with helicopters. However, reliable data that can also be used for the necessary spray drift risk assessment are hardly available (OECD, 2021).
The aim of this study was to collect spray drift data from several UASSs in slope vineyards in order to compare these data with basic drift values for ground sprayers as a basis for drift risk assessment by authorities. The variation of drones, application parameters and flight patterns in this study should help to obtain results with sufficient practical relevance for a reasonable range of conditions. Different nozzles were used to identify the best available technology to reduce spray drift as required for aerial application systems by EU legislation (EU, 2009).
A spray drift study according to ISO 22866 (ISO, 2005) was conducted with several UASSs equipped with different nozzles (see Table 1).
Table 1. Tested variants and application parameters
no. | date | stage BBCH | drone | nozzle | nozzle flow rate L/min | pressure bar | flight speed km h-1 | swath width m | application rate L ha-1 | flight highta m | flight orientationb | replicates |
1 | 18.07.19 | 79 | MG-1S | 4 × Airmix 110-015 | 1.08 | 2.4 | 9.0 | 2 | 70.8 | 1 | longitudinal | 5 |
2 | MG-1S | 4 × XR 110-015 | 1.1 | 2.4 | 72.1 | 1 | 5 | |||||
3 | 16.10.19 | 92 | MG-1P | 4 × IDK 90-025 | 0.62 | 1.2 | 6.6 | 3 | 75.2 | 2 | lateral | 3 |
4 | MG-1P | 4 × XR 110-01 | 0.45 | 4.0 | 4.8 | 75.0 | 2 | 3 | ||||
5 | T16 | 8 × IDK 90-025 | 0.6 | 1.1 | 12.8 | 75.0 | 2 | 3 | ||||
6 | T16 | 8 × XR 110-01 | 0.45 | 4.0 | 9.6 | 75.0 | 2 | 3 | ||||
7 | T16 | 8 × IDK 90-025 | 0.6 | 1.1 | 12.8 | 3 | 75.0 | 2 | longitudinal | 3 | ||
8 | 25.10.22 | 95 | MG-1S | 4 × Airmix 110-015 | 0.5 | 2.1 | 5.4 | 3 | 74.1 | 2 | lateral | 4 |
9 | 10.10.19 | 91 | EVO-X8 | 5 × ATR brown | 0.38 | 3.0 | 7.6 | 2 | 75.4 | 1 | longitudinal | 3 |
a above canopy
b relative to the rows of vines
As it was not possible to find suitable steep slope vineyards with sufficient empty downwind space, the study had to be conducted on areas with a lower inclination. The majority of experiments (no. 1 to 8) took place at a vineyard in the district of Weingarten (Baden), northeast of Karlsruhe (49°03'27" N; 8°33'47" E). The rows of vines were oriented north to south with a slope of 13% (7.4°). One of the tests (no. 9) was conducted in Geisenheim (49°59'38" N; 7°58'28" E) with the rows oriented northwest to southeast with a slope of 15% (8.5°). At both locations, the vine row spacing was 2 m and the height of the canopy was between 2 m and 2.2 m. The canopies were at phenological stages of BBCH 71 to 95 and had a substandard leaf density especially at test 9 when 50% of the leaves were lost already.
The tests were conducted with different octocopter drones. The DJI drones Agras MG-1S, Agras MG-1P (compared to 1S improved in range and obstacle detection) and Agras T16 were employed for the tests in Weingarten whereas a Multikopter.de EVO-X8 was used in Geisenheim. The drones used and their main parameters are shown in Figure 1. The UASSs were equipped with different nozzles, such as TeeJet XR 110-015 (standard flat fan), Albuz ATR brown (standard hollow cone), agrotop Airmix 110-015 and Lechler IDK 90-025 (both air induction flat fan nozzles). Spray pressure and flight speed were adjusted to obtain an application rate of approximately 75 L ha-1 considering the swath width from the UASSs. During the application, the time needed to fly along the lines was manually measured to check the speed. Prior to the tests, the volume flow rate emitted by each nozzle was measured in order to calculate the actual application rate for each test obtained from flow rate, set swath width and flight speed (Table 1). This was monitored by measuring the volume sprayed on the treated area. The set flight height varied from 1 m to 2 m above the top of the canopy. Compliance with the set height was checked occasionally using a measuring stick.

Fig. 1. Drones used for the experiments. a) DJI Agras MG-1 (max. take-off mass 24 kg, max. payload 10 kg), b) DJI Agras T16 (41 kg, 15 kg), c) Multikopter.de EVO-X8 (50 kg, 17 kg)
Different flight patterns were applied (see Fig. 2). For some of the test, the drones flew in longitudinal direction along the rows beginning at the downwind side of the vineyard. The flight distance was approximately 50 m. In other tests, the same area was treated flying in lateral direction across the rows. The edge row was spared from the treatment for some tests in both cases. The orientation of the drone was forward and backwards without turning around when chanced flight direction. In all cases, broadcast spray applications were carried out differently from those described by Biglia et al. (2022) exploiting band application when flew longitudinal. The drones were operated in automatic mode during the tests on pre-defined flight lines at pre-set height and speed with the accuracy provided by the GPS navigation with a manual correction using a reference point at the test site. The positioning error was in the range of 10 cm. An RTK-DGPS was used only for test 9 in Geisenheim providing a positioning accuracy of 2 cm.
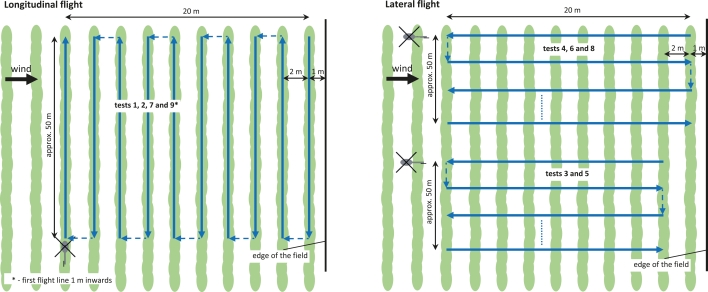
Fig. 2. Top view on the flight patterns applied for the tests. In each case, the drift sediment sampling area with 10 petri dishes at each distance of 3, 5, 10, 15 and 20 m from the edge of the field was located downwind.
Lines of ground collectors consisting of 10 petri dishes (greiner bio-one, ref. 6391102, 145 mm in diameter) with a spacing of 1 m at downwind distances of 3 m, 5 m, 10 m, 15 m and 20 m from the edge of the field were arranged on metal planks in the longitudinal centre of the treated area to collect the spray drift sediment. According to ISO 22866, the edge of the field was considered a virtual line situated half a vines row spacing downwind from the last vines row (Fig. 2). The area downwind from the vineyard hosting the drift collectors was cropped with grass cut to 10 cm height in maximum (Fig. 3).

Fig. 3. View on the inclined vineyard in Weingarten during a test with the drone applying the test liquid, the short grass canopy on the downwind area and the planks supporting the petri dishes for drift sediment collection
All tests were conducted at least 3 times. The number of actual replicates are listed in Table 1. For variant 8, 4 replications were performed but one of them (test 8.4) was excluded from evaluation since the values incomprehensively exceeded those from the other replicates by an order of magnitude and were therefore considered as outliers. Although the wind speed was slightly higher at this test (Table 1), it was not possible to identify any reason for this outlier.
Weather data, such as wind speed and direction as well as air temperature, were recorded using a weather station Wento-Ind (Lambrecht) installed in the longitudinal centre approximately 20 m downwind from the vineyard at 3 m height above the ground with a sample rate of 1 s-1.
The spray liquid was water with Brilliant Sulfoflavine (BSF17, batch 1F-561, Waldeck) as tracer dye with a concentration of 4 g L-1 for tests 1 to 7 in Weingarten and with Pyranin 120% (batch CHU90294, Lanxess) with a concentration of 5 g L-1 in Geisenheim (test 9). Pyranin (batch CHD90018) was also used for test no. 8, with a concentration of 8 g L-1. All samplers for drift deposit were collected within less than 10 min after each test and stored in a box protected from light exposure in order to minimise degradation. Considering a time for each treatment of 7 min in maximum, the total exposure time of the petri dishes to sunlight could have caused a maximum decay of fluorescence for Pyranine of about 5% (Herbst & Wygoda, 2006). As it was shown in former unpublished tests, the potential decay for BSF is even lower.
The samplers were stored in a dark, cool room and analysed within 14 days after the tests. For analyses, the tracer was extracted from the petri dishes using 50 mL (60 mL for test 9 in Geisenheim) of de-ionised water. These samples were analysed with a fluorimeter (Perkin-Elmer LS45). Samples of the spray liquid taken from a nozzle of the UASS after each treatment were diluted in de-ionised water and used as calibration liquid for the calculation of the volume of spray liquid found on each petri dish. The volume of the spray liquid Vc on each collector was calculated as:
 (1)
(1)
with
FLb – fluorimeter reading for the blank sample
FLc – fluorimeter reading for the calibration liquid
FL – fluorimeter reading for the sample
Ccl – concentration of the spraying liquid in the calibration liquid
Vw – volume of the washing liquid/ml.
From these values, the deposit dc on each drift collector was calculated as percentage of application rate:
 (2)
(2)
with
Ac – sampling area/cm2
R – application rate/L ha-1
A statistical evaluation was conducted to calculate the 90th percentile from the 30 or 50 deposit values for each downwind distance and test variant using the QUANTIL function in EXCEL2016. This method corresponds to the procedure used to establish the basic drift values for other applications as mentioned above and allows comparing them to the results of this study.
The meteorological conditions for each test are listed in Table 1. The acceptance criteria for valid drift measurements defined regarding wind conditions by ISO 22866 as well as regarding the maximum air temperature of 25 °C and maximum wind speed of 5 m s-1 recommended by the German code of practice (BMEL, 2010) are met for almost all tests. In a few cases, the maximum deviation of the main wind direction from the perpendicular to the row orientation exceeded the limit of 30 deg slightly. Since the deviations were small, all measurements were included in the evaluation. The fraction of wind speed outliers < 1 m s-1 was 0% for all tests.
In total 310 drift sediment values were available per downwind distance, among them 170 from air inclusion nozzles.
The drift sediment curve representing the 90th percentiles of the measuring values from all tests are shown in Figure 4. Compared to the official basic drift values for vine representing ground based air blast sprayers (BBA, 2000), the drift values for drones, calculated for all nozzles, are a little higher. As the values for crewed helicopters are much higher than for ground based sprayers (BVL, 2020), the helicopter values are not shown in Figures 4 or 5 for clarity.
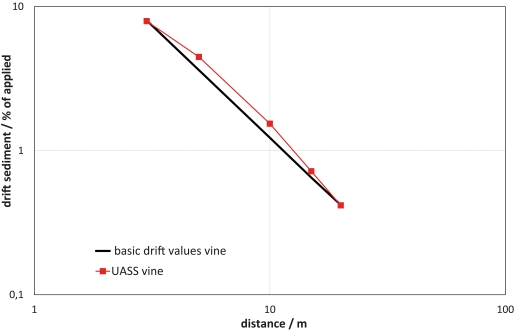
Fig. 4. 90th percentiles of drift sediment from all measurements compared to the basic drift values for ground based equipment for vineyards.
It is known from ground equipment that air induction nozzles can reduce spray drift due to the increased droplet size. This can be shown also for UASS application with a separate evaluation for the test with standard nozzles and air induction nozzles (Fig. 5). Using air induction nozzles, the 90th percentile values at all downwind distances are lower than the basic drift values for vine.
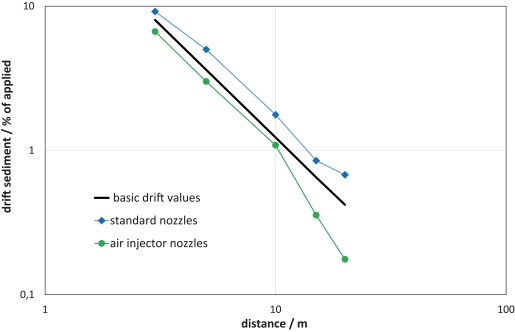
Fig. 5. 90th percentiles of drift sediment from different nozzle designs compared to the basic drift values for ground based equipment for vineyards.
Table 2. Average meteorological conditions for each test (in brackets: acceptance criteria according to ISO 22866 or German code of practice)
test.replicate | wind speed m s-1 (< 5 m s-1) | deviation wind deg (< 30 deg) | fraction of wind direction deviations < 45° % (< 30%) | temperature °C (< 25 °C) | air humidity % (> 30%) |
1.1 | 2.1 | 19.9 | 4.7 | 20.0 | 64.2 |
1.2 | 2.1 | 17.4 | 4.0 | 20.4 | 63.5 |
1.3 | 2.4 | 20.8 | 4.7 | 20.9 | 61.5 |
1.4 | 2.7 | 20.8 | 3.2 | 21.0 | 58.8 |
1.5 | 2.5 | 19.0 | 6.6 | 21.5 | 57.3 |
2.1 | 2.7 | 14.9 | 1.9 | 22.2 | 55.0 |
2.2 | 2.5 | 27.3 | 8.5 | 22.6 | 53.8 |
2.3 | 2.5 | 22.4 | 11.4 | 23.2 | 52.3 |
2.4 | 2.5 | 24.7 | 14.7 | 23.5 | 51.4 |
2.5 | 2.8 | 19.7 | 7.5 | 24.1 | 50.6 |
3.1 | 2.5 | 28.4 | 11.7 | 13.6 | 72.0 |
3.2 | 3.2 | 22.5 | 7.6 | 13.2 | 72.6 |
3.3 | 2.4 | 29.4 | 17.5 | 13.5 | 73.4 |
4.1 | 2.6 | 30.1 | 15.2 | 13.3 | 73.0 |
4.2 | 2.4 | 24.4 | 9.1 | 15.5 | 68.5 |
4.3 | 3.5 | 20.5 | 9.3 | 15.9 | 66.0 |
5.1 | 3.6 | 24.0 | 12.1 | 17.1 | 62.0 |
5.2 | 3.1 | 24.6 | 8.5 | 16.5 | 63.1 |
5.3 | 3.9 | 16.1 | 0.0 | 17.2 | 60.1 |
6.1 | 3.3 | 18.2 | 2.1 | 16.8 | 63.2 |
6.2 | 4.2 | 19.3 | 1.7 | 16.6 | 61.8 |
6.3 | 3.9 | 20.1 | 1.4 | 16.8 | 60.3 |
7.1 | 3.9 | 20.8 | 7.2 | 18.5 | 56.0 |
7.2 | 5.0 | 10.8 | 0.0 | 18.4 | 55.4 |
7.3 | 3.3 | 32.0 | 20.7 | 17.9 | 57.0 |
8.1 | 2.1 | 20.2 | 4.5 | 15.1 | 76.6 |
8.2 | 2.1 | 31.4 | 19.8 | 16.8 | 73.1 |
8.3 | 1.7 | 19.7 | 7.9 | 18.6 | 66.2 |
8.4 | 3.2 | 13.6 | 0.3 | 17.3 | 73.1 |
9.1 | 2.8 | 19.9 | 17.9 | 13.4 | 61.7 |
9.2 | 3.5 | 0.6 | 7.2 | 13.9 | 60.3 |
9.3 | 2.7 | 1.9 | 13.0 | 13.8 | 61.0 |
A data set with all test details, drift sediment data as well as the detailed weather conditions is available from Herbst et al. (2023).
The spray drift values found in this study are the result of a collection of tests with different UASSs, nozzle types and applications. Although it was not possible to systematically combine all the influencing factors and the number of tests was too low to quantify the impact of these factors on spray drift, the test variants include longitudinal and lateral flights, flight heights up to 2 m above the canopy as well as flight speeds up to 13 km h-1 and therefore represent a reasonable range of practical application scenarios for drones in German steep slope vineyards. The design of the drones used for the tests did not vary substantially. It was shown by Herbst et al. (2020), though, that different designs of drones (mass, number of rotors) did not significantly influence the amount of spray drift.
In comparison to PPP applications with crewed helicopters, the spray drift risk is substantially lower when using UASSs (BVL, 2020). This as well as other advantages, such as reduced requirements regarding infrastructure and pilot qualification, are indicative for replacing helicopters by drones for PPP application in steep slope vineyards. According to EU legislation (EU, 2009), aerial spraying systems shall be equipped with the best available technology to reduce spray drift. It was clearly shown that for UASSs standard nozzles do not comply with this requirement. This is why, similar to crewed helicopters, UASSs should be equipped with drift reducing atomisers, such as air induction nozzles. Providing this, the existing basic drift values for vineyards would apply also for UASS applications.
It is assumed that the results of this study provide an appropriate first basis for drift risk assessment for PPP applications in steep slope vineyards taking into account also the limited scale of this application in Germany. The whole data set produced in this study is published (Herbst et al., 2023) to enable a more detailed analysis of the results. Further spray drift tests will be helpful to broaden this basic data set, also considering the upcoming use of rotary atomisers for PPP application with UASSs.
The authors wish to acknowledge Freimut Stephan from the Service Centre for the Rural Area Rheinland-Pfalz and Manuel Becker from the Governmental Research Station for Fruit and Wine Growing (LVWO) Weinsberg for piloting the drones at the experiments in Weingarten as well as Roland Bahmer from the Center for Agricultural Technology Augustenberg and all the other technical staff for their help on the field and in the lab. Special thanks also to LVWO Weinsberg and the Federal Office of Consumer Protection and Food Safety (BVL) for the financial support for the field tests.
The author(s) declare that they do not have any conflicts of interest.
A data set with all test details, drift sediment data as well as the detailed weather conditions is available under https://doi.org/10.5073/20230328-170409-0.
BBA, 2000: Bekanntmachung über die Abtrifteckwerte, die bei der Prüfung und Zulassung von Pflanzenschutzmitteln herangezogen werden vom 8. Mai 2000. BAnz AT Nr. 100, 25. Mai 2000.
Biglia, A., M. Grella, N. Bloise, L. Comba, E. Mozzanini, A. Sopegno, M. Pittarello, E. Dicembrini, L. Eloi Alcatrão, G. Guglieri, P. Balsari, D. Ricauda Aimonino, P. Gay, 2022: UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Science of the Total Environment 845, 157292, DOI: 10.1016/j.scitotenv.2022.157292.
BMEL, 2010: Grundsätze für die Durchführung der guten fachlichen Praxis im Pflanzenschutz. BAnz Nr. 76a, 21.05.2010.
BVL, 2020: Sechste Bekanntmachung über die Abdrifteckwerte, die bei der Prüfung und Zulassung/Genehmigung von Pflanzenschutzmitteln herangezogen werden (BVL 20/02/05) vom 18. Mai 2020. BAnz AT, 21.08.2020 B2.
DE, 2012: Gesetz zum Schutz der Kulturpflanzen (Pflanzenschutzgesetz – PflSchG). BGbl. I S. 148, 1281).
EU, 2009: DIRECTIVE 2009/128/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 21 October 2009 establishing a framework for Community action to achieve the sustainable use of pesticides. Official Journal of the European Union L 309: 71-86.
Herbst, A., J. Bonds, Z. Wang, C. Wang, A. Zeng, X. He, P. Goff 2020: The influence of Unmanned Agricultural Aircraft System design on spray drift. Journal für Kulturpflanzen 72 (1), 1-11, DOI: 10.5073/JfK.2020.01.01.
Herbst, A., M. Glaser, K.-U. Bartsch, 2023: Spray drift data from drones in vineyards [Data set]. OpenAgrar Repository, DOI: 10.5073/20230328-170409-0.
Herbst, A., H.-J. Wygoda, 2006: Pyranin – ein fluoreszierender Farbstoff für applikationstechnische Versuche. Nachrichtenblatt des Deutschen Pflanzenschutzdienstes 58, 79-85.
ISO, 2005: ISO 22866:2005 – Equipment for crop protection – Methods for field measurement of spray drift.
OECD, 2021: Report on the State of the Knowledge – Literature Review on Unmanned Aerial Spray Systems in Agriculture, OECD Series on Pesticides, No. 105, OECD Publishing, Paris.
Strub, L., S. Loose, 2016: Steil! Steillagenweinbau in Deutschland. Der Deutsche Weinbau 25-26/2016, 14-18.
 Suchen
Suchen